Other command/mode settings (continued) – Yaskawa MP940 Reference Manual User Manual
Page 229
MotionSuite™ MP940 Machine Controller Reference Manual
Parameter Details
6-29
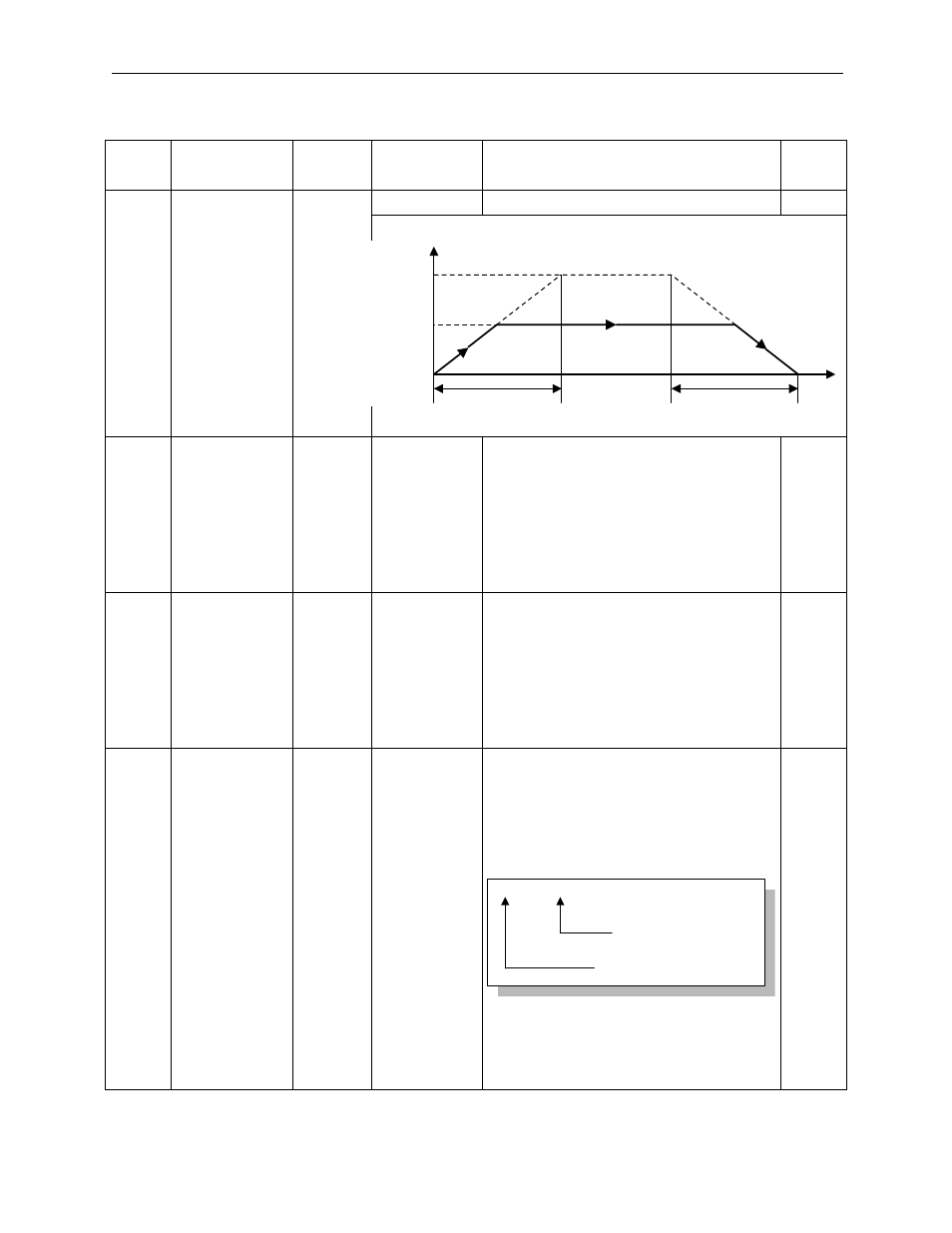
14
Linear
Deceleration
Time
OWC00D 0 ~ 32767
—
0
15
Positioning
Completed
Range
OWC00E 0 ~ 65535
Used in position control zero-point return
modes.
Sets the range in which the positioning
completion signal (bit 13 of IWC000) or
zero-point return completion signal (bit 15
of IWC000) turns ON.
Command Unit: See the description of bit
D of IWC000.
10
16
Following Error
Limit
OWC00F
0 ~ 65535
Used in the position, phase control, and
zero-point return modes.
Sets the limits outputting deviation error
(bit 0 of IWC000). Upon exceeding this
range, the deviation error goes ON, and
position control is executed using this
value as the deviation.
Deviation error is not detected if 0 is set.
65535
17
Position Loop
Gain
OWC010
0 ~ 32767
Parameter that sets up servo [Position
Loop Gain].
The [Position Loop Gain] is an important
constant that determines servo response
performance. The scale of the setting
value is shown as follows:
Set up the most suitable value according
to machine rigidity, inertia, servo motor,
etc.
• Setting range:1 ~ 32767 [0.1/s]
300
(30.0)
Other Command/Mode Settings (Continued)
Number
Name
Register
Number
Setting Range
Content
Default
Value
Speed (%)
NR
(100%)
NREF
0
NACC
NDEC
Time
(t)
Speed
Reference
40 ~ 250
Responsiveness is
extremely good (beware
of hunting!)
Normal Responsiveness