Yaskawa MP940 Reference Manual User Manual
Page 240
Parameter Details
MotionSuite™ MP940 Machine Controller Reference Manual
6-40
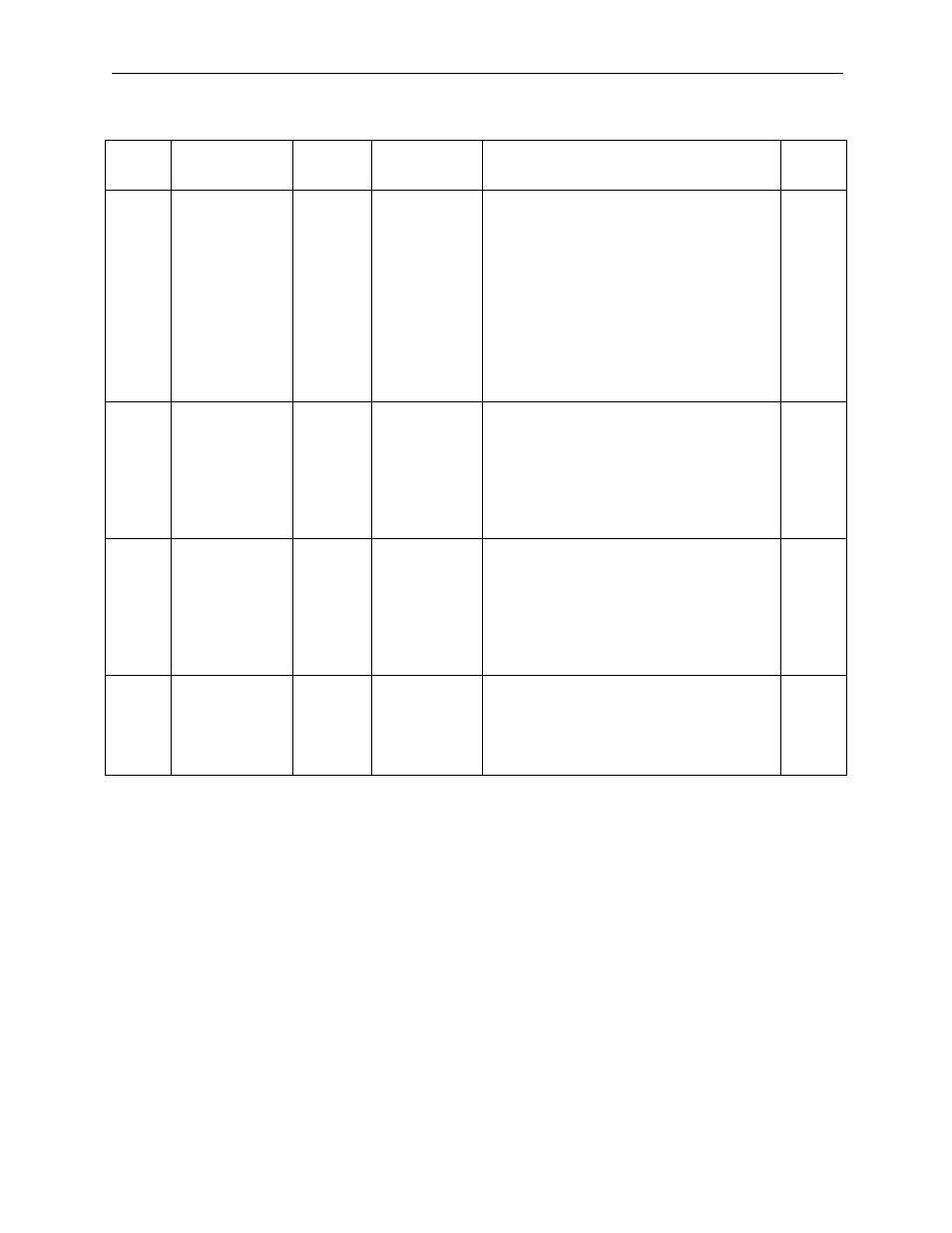
53
Position
Complete
Timeout
OWC034
0 ~ 66535
Set the positioning time-over (Bit 6 of
ILC0022) detection limit (1 = 1ms).
A positioning time-over results after feed
completion (Bit 2 of IWC015 is ON) if the
positioning completion signal (Bit 13 of
IWC000) is not ON even though this
range has been exceeded.
This check is not performed if set to 0.
Used when a motion command
(OWC020) is used in the position control
mode.
0
54
Position
Control Integral
Time
OWC035
0 ~ 32767
Set the integral time (1 = 1ms) when used
in a position loop or PI control (Bit 8 of
OWC021).
The integral operation is not executed if 0
is set.
Used in position control mode or zero-
point return mode.
300
55
Integral Upper/
Lower Limit for
Position Control
OWC036
0 ~ 32767
Set the upper/lower limit of the integral in
cases of use in position loop or PI control
(Bit 8 of OWC021).
The limit is applied to this range when the
integral output exceeds this range.
Used in position control mode or zero-
point return mode.
32767
56
First Order Lag
Constant
OWC037
0 ~ 32767
Sets the one-time delay time constant (1 =
1ms) in the position loop. The one-time
delay operation is not executed if 0 is set.
Used in position control mode or zero-
point return mode.
0
Other Command/Mode Settings (Continued)
Number
Name
Register
Number
Setting Range
Content
Default
Value