Yaskawa MP940 Reference Manual User Manual
Page 470
MotionSuite™ MP940 Machine Controller Reference Manual
Zero-point Return (ZRET)
11-73
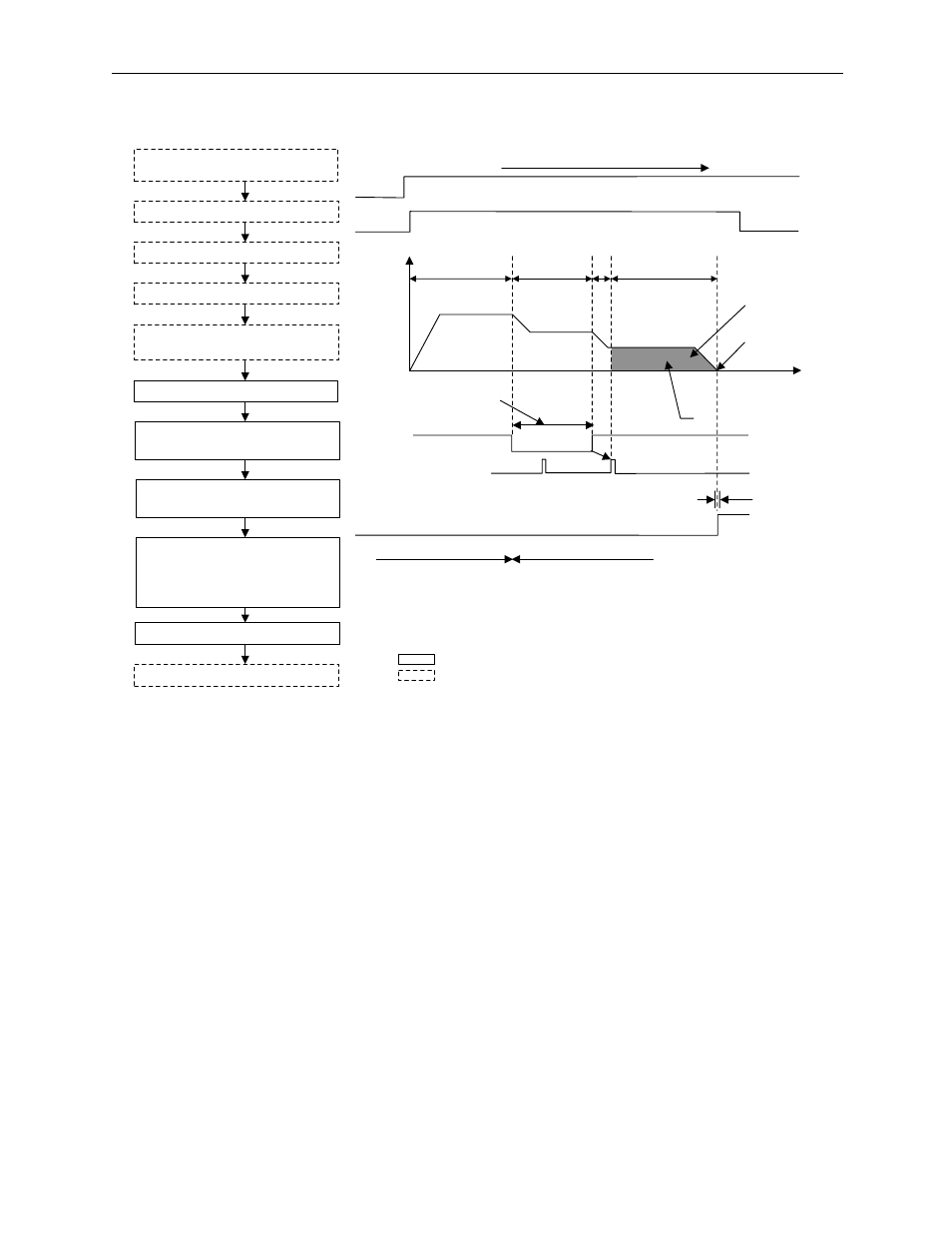
1. Set initial fixed motion parameter and motion setting parameter values
to match the customer's machine.
2. Select the position control mode (PCON) (bit 2 of OWC000).
3. Set the motion setting parameters used in zero-point return (ZRET).
4. Turn the RUN command (Bit 0 of OWC001) ON.
5. Set zero-point return (ZRET = 3) in the motion commands (OWC020).
6. Zero-point Return (ZRET) Operation Start
Speed
Reference
0
Fast Feed
Speed
Reverse Forward
Zero
Creep Speed
Approach
Speed
Dog-leg
(deceleration LS)
Zero Point Signal
(C-phase pulse)
Time
Zero Point
Return
Position
Zero Point Return Final
Run Distance
1.
2.
3.
4.
RUN
1. Fixed Motion Parameter Setting
Sets the initial values of motion
setting parameters
2. Position Control Mode (PCON) Setting
3. Setting of Motion Setting Parameters
4. Servo ON (RUN)
6. Motion at fast feed speed in the
designated direction
Signifies system execution.
ZRET
5. Execution of zero point return (ZRET)
motion command
7.Decelerate to approach speed at
downward transfer of deceleration LS
signal
Positioning
Completion Area
Signifies user setting.
10. Zero Point Return Completion (ZRNC)
is ON.
11. Executes the motion command
(NOP(=0))
Direction Designated in the Zero Point Return Direction (OBC0009)
Zero Point Return
Final Run Position
Limit Switch Width>/= 2 x Ts
(Ts: High-speed scan setting)
*2
ZRNC
Region A
Region B
*1
8. Decelerate to creep speed at upward
transfer of deceleration LS signal
9. After the decleration LS signal goes
HIGH, the axis will move for the final
zero point running ditance only and then
stop following the initial zero point
signal, and that position will be treated
as machine coordinates.