Run command setting (svruncmd) (continued) – Yaskawa MP940 Reference Manual User Manual
Page 223
MotionSuite™ MP940 Machine Controller Reference Manual
Parameter Details
6-23
2
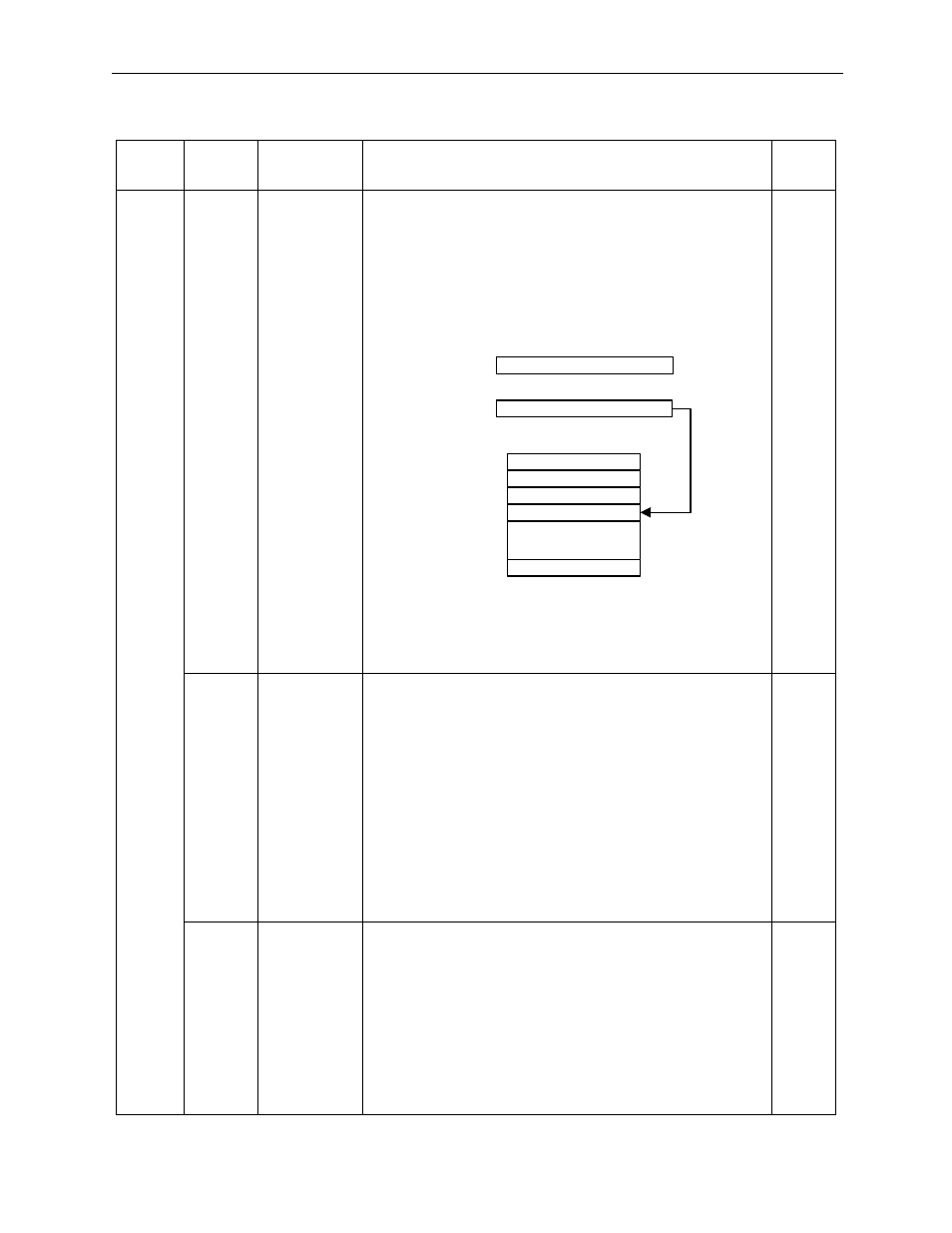
Bit 12
Position
Reference
Selection
(USE_BUF)
Selects the position reference data designation method.
Enabled only when the motion command (OWC020) is
used in the position control mode.
0: The direct designation (OLC012) data is assumed to be
the position reference data.
1: The indirect designation (OLC012) data is assumed to
be the position buffer number.
The position buffer is inside the MP940 module, and must
be written into the startup drawing at power ON.
For writing to the position buffer, see OBC012E,
OBC012F, and OLC03A.
0
Bit 13
Speed
Reference
Selection
(SPDTYPE)
Selects the speed designation method such as feed
speed, approach speed, creep speed, etc.
Enabled only when the motion command (OWC020) is
used in the position control mode.
0: Designate the speed in command units, and set the fast
feed speed into OLC022.
The approach speed (OWC00A) and creep speed
(OWC00B) setting units are also 1 = 10n command units/
min.
1: Designate the speed in percentage (%), and set the fast
feed speed into OLC015.
The approach speed (OWC00A) and creep speed
(OWC00B) setting units are also 1 = 0.01%.
0
14
Position Refer-
ence Type
(XREFTYPE)
Selects the data type for position reference data OLC012
when motion command (OWC020) is used in position con-
trol mode.
0: Absolute Position Format
Sets the absolute position in OLC012.
1: Incremental Addition Format
Sets data into OLC012 in which the current movement is added
to the previous value of OLC012.
Note: The absolute position format is assumed when indi-
rect designation is selected for the position reference.
1
Run Command Setting (SVRUNCMD) (Continued)
Number
Register
Number
Bit Name
Content
Default
Value
Position Reference
OLxx12
Position Buffer
Position Reference Data 1
2
.
.
.
Position Reference Data 100
.
.
.
256
100
Direct
Reference
Indirect
Reference
Position Buffer Pointer