Yaskawa MP940 Reference Manual User Manual
Page 131
Mechatrolink Function
MotionSuite™ MP940 Machine Controller Reference Manual
4-40
Operation mode switching is executed according to the motion setting
parameter Operation Mode Setting (OWC000 Bit0 ~ Bit4).
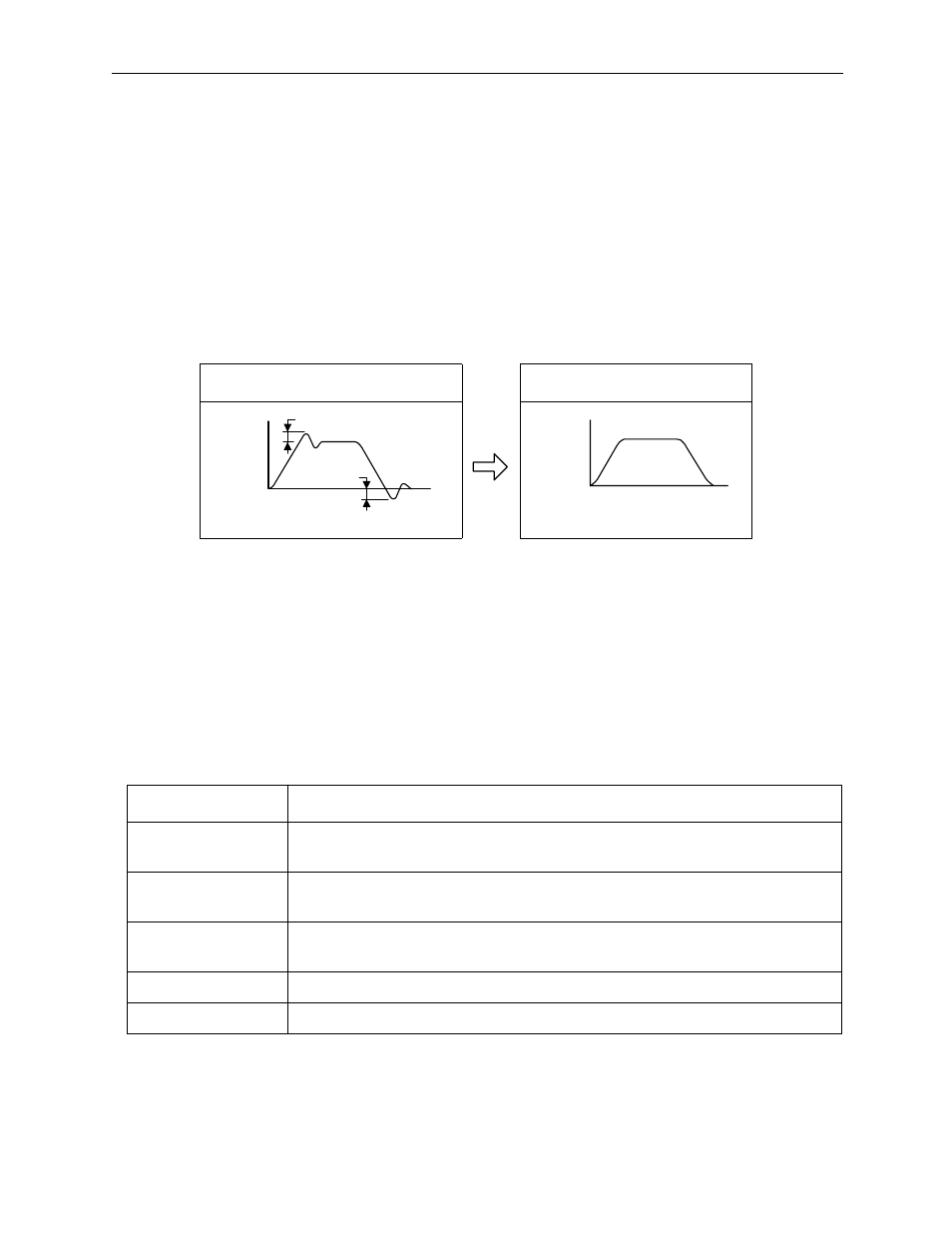
2. P/PI switching of the servo amplifier (SGDH) speed loop is possible
during operation.
A usage example is given below.
• To Suppress Overshoot During Acceleration
• To suppress Undershoot and Shorten Settling Time
Speed loop P/PI switching is executed according to the motion setup
parameter RUN Command (OBC0011).
3. Parameter change is possible during operation.
The following parameters can still be changed during operation by the ladder
or motion program.
No speed loop P/PI control switching
Speed loop P/PI control switching
Changeable Parameters
Parameter Type
Change Method
Target Position
Still changeable by the motion setting parameter position reference setting
(OLC012)
Speed
Still changeable by the motion setting parameters speed reference setting
(OWC015) and speed reference setting (OWC022).
Accel/Decel Time
Constant
Still changeable by the motion setting parameters linear acceleration time con-
stant (OWC00C) and linear deceleration time constant (OWC00D).
Position Loop Gain
Still changeable by the motion setting parameter position loop gain (OWC010).
Feed Forward Gain
Still changeable by the motion setting parameter feed forward gain (OWC010).
Overshoot
Undershoot
Motor
Speed
Time
Motor
Speed
Time