Yaskawa MP940 Reference Manual User Manual
Page 458
MotionSuite™ MP940 Machine Controller Reference Manual
External Positioning (EX_POSING)
11-61
g.
Command Abort
Turns the ABORT command (bit 1 of OWC021) ON or sets NOP
(= 0) into the motion commands.
BUSY (bit 0 of IWC0150) will go ON during abort processing,
and OFF at abort completion.
Upon input of the latch signal, the axis shifts by the external positioning run
distance (OLC024). The axis remains stopped even if ABORT is released
(ABORT OFF) at abort completion. The axis remains stopped whether the
position reference type (bit 14 of OWC001) is set to “absolute position type
(= 0)” or “incremental addition type (= 1)”.
The positioning completion signal POSCOMP (bit D of IWC000) is ON
upon entering the positioning completion range (OWC00E) following feed
completion (bit 2 of IWC015 is ON).
Release external positioning in the motion commands when positioning is
complete.
External positioning detects the boot-up. Therefore, the motion commands
must be set to NOP for at least one scan, and to reset external positioning into
the motion commands once external positioning has been executed.
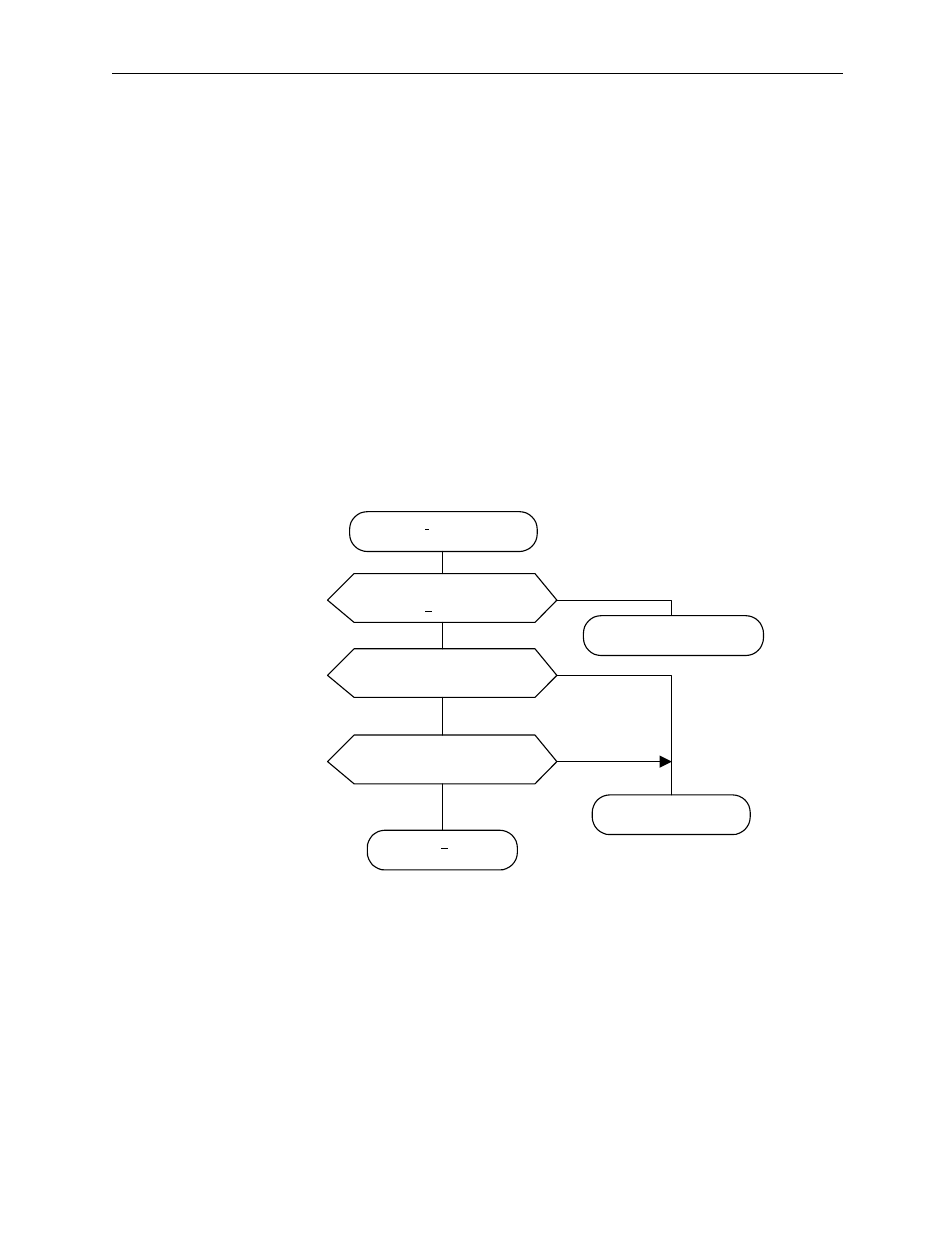
EX POSING
Completion Conditions Check
Motion Command Response
= EX_POSING?
Motion Command Status
BUSY= OFF?
RUN Status
POSCOMP=ON?
return(EX_POSING
Completion)
return (execution of other
motion commands)
return(EX_POSING
Execution)
YES
YES
YES
NO
NO
NO