IAI America MSEP User Manual
Page 86
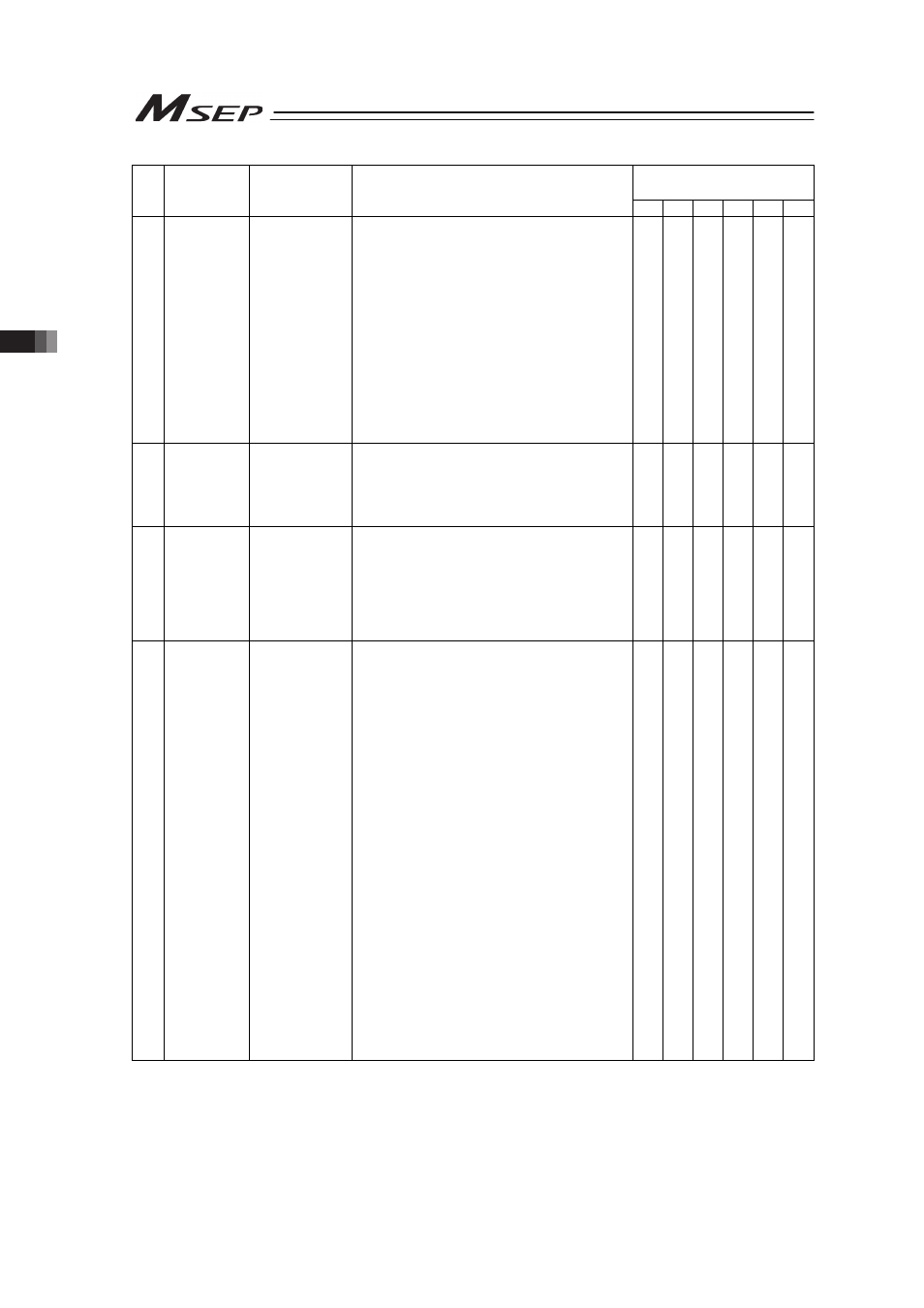
3.2 Initial Setting
78
Operation Pattern
({ : Available for Setting)
No. Setting Item Setting Range
(Set in delivery)
Description
0
1
2
3
4
5
4 Intermediate
Stop System
Both Solenoid
ON/
Both Solenoid
OFF
(Both Solenoid
OFF)
This is available only if Operation Pattern 3 is
selected. Select whether to have the
movement to the intermediate point
performed with the forward end movement
command and backward end movement
command both being turned OFF or both
turned ON.
In the case the same use procedure as for
5-port 3-position electromagnetic valve is
applied, select “Both Solenoid OFF”.
In the case that the same use procedure as
the time when two units of the 3-port single
solenoid electromagnetic valve, are used,
select “Both Solenoid ON”.
{
5 Servo
Control
Use/
Not to Use
(Not to Use)
When “Not to Use” is selected, the
servo-motor is automatically turned ON after
the power input.
When “Use” is selected, servo is turned ON
only while CON signal of the input IN3 is ON.
{
{
{
{
{
{
6 Home
Position
Operation
AUTO/MANU
(MANU)
If AUTO is selected, the home-return
operation is started automatically when the
servo is turned for the first time after the
power is supplied.
“MANU” is selected, the home return
operation is performed with the first
movement signal (ST0) input.
{
{
{
{
{
{
7 Output
Signal Type
Limit Switch
Output/
Completed
Position Output
(Limit Switch)
Select the output system for the positioning
complete signal.
• Limit Switch Output
After home return operation, it turns ON
when in the range of
forward/intermediate/backward
positioning width no matter of servo
ON/OFF or the movement if there is ore
there is not.
Intermediate Point is reached : LS2 ON
Forward End is reached.
: LS1 ON
Backward End is reached.
: LS0 ON
• Completed Position Output
When the actuator reaches the target
position, it is turned ON. This signal
turns OFF with the servo being OFF.
When the servo-motor is turned ON
again and the current position is within
the positioning width, it is turned ON.
Intermediate Point is reached : PE2 ON
Forward End is reached.
: PE1 ON
Backward End is reached.
: PE0 ON
(Note) It becomes OFF before home return
operation no matter which output
method.
[Refer to Section 3.8.2 for the details.]
{
{
{
{
{
{