IAI America MSEP User Manual
Page 179
3.8 I/O Signal Controls and Function
171
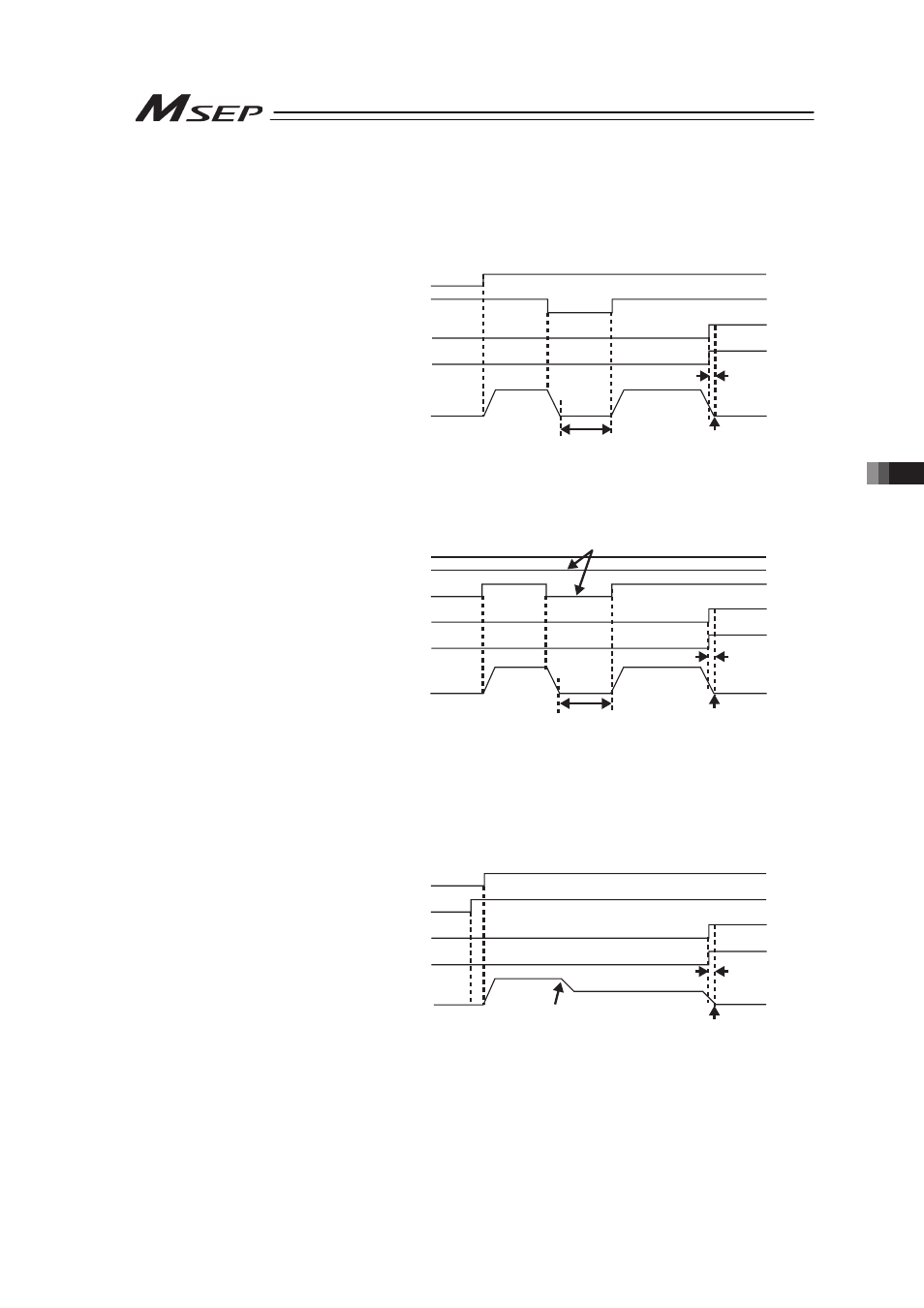
[9] Pause during Movement = Operation Timing for Operation Patterns 0 to 2
(1) Single Solenoid System:
With the input of the pause signal (*STP), the actuator pauses its operation. Shown below is
an example for the forward end position movement.
Pause signal (*STP)
Movement command (ST0)
Forward end point positioning completion output (PE1)
Forward end position detection output (LS1)
Actuator operation
Pause
Forward end
Positioning width
(Parameter No.1)
(2) Double Solenoid System:
By turning both ST0 and ST1 OFF, the operation of the actuator is paused. Shown below is
an example for the forward end position movement.
Forward end point positioning completion output (PE1)
Forward end position detection output (LS1)
Backward end movement signal (ST0)
ST0 and ST1 are OFF
Forward end movement signal (ST1)
Actuator operation
Pause
Forward end
Positioning width
(Parameter No.1)
[10] Speed Change during Movement = Operation Timing for Operation Patterns 1
(1) Single Solenoid System:
With the movement speed change signal (SPDC) turned ON, the actuator is operated with
the changed speed from the position set as the change position in the position data. Shown
below is an example for the forward end position movement.
Forward end point positioning completion output (PE1)
Forward end position detection output (LS1)
Movement signal (ST0)
Movement speed change signal (SPDC)
Actuator operation
Position set in change position
Forward end
Positioning width
(Parameter No.1)