7 power supply – IAI America MSEP User Manual
Page 157
3.7 Power Supply
149
3.7 Power Supply
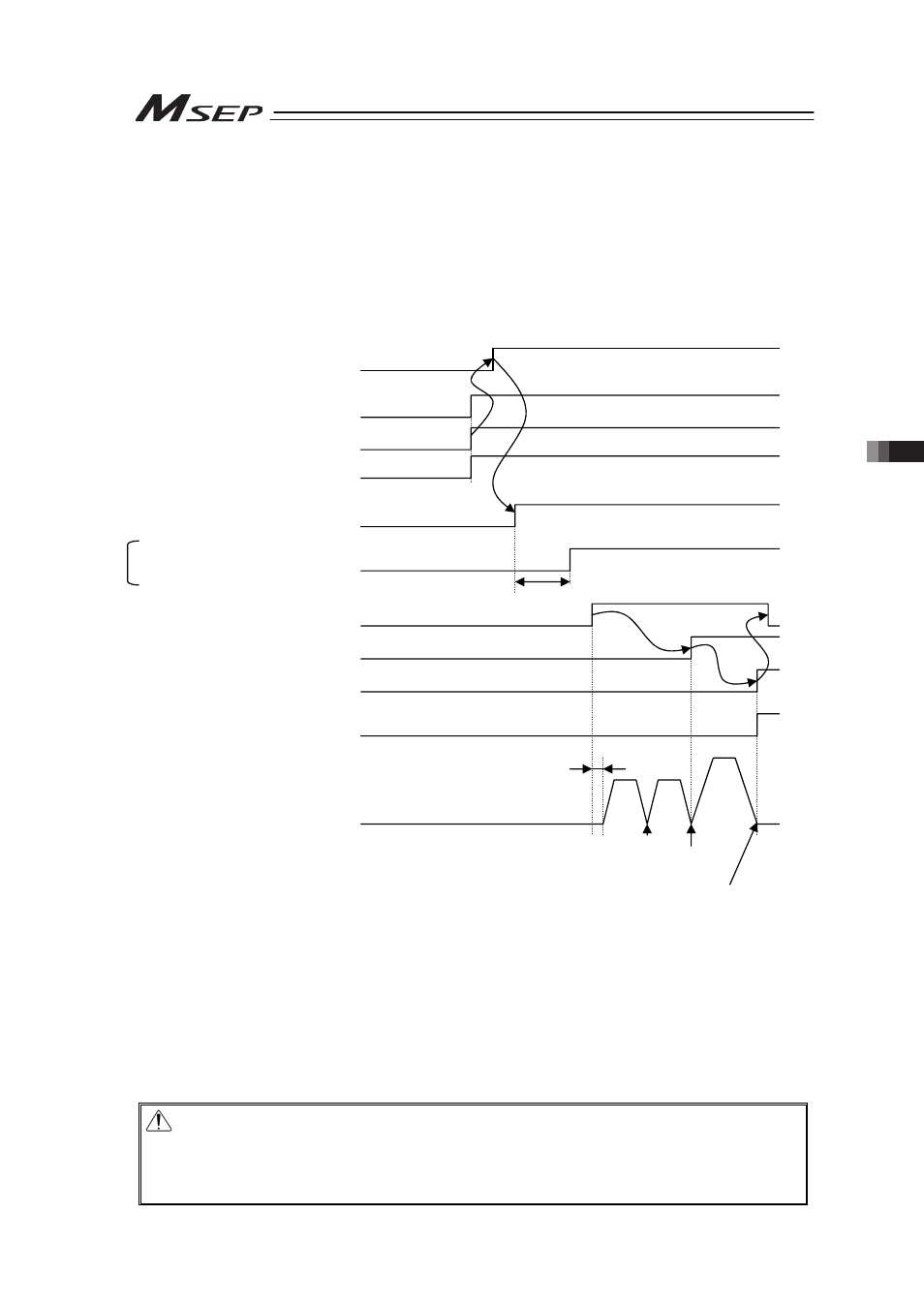
Follow the steps below to turn ON the power to the controller.
1) Supply I/O power, control power and the drive (24V DC).
2) Cancel the emergency stop condition or make the motor drive power supply available to turn
ON.
3) If using the servo-on signal, input the signal from the host side.
4) Input the home return signai (HEND) or movement signal (ST0) from the host side.
(Positioning is performed at ST0 after the home return.)
Safety Circuit Status
Emergency Stop
Emergency Stop Release
I/O power supply (24V DC) input
Control power (24V DC) input
Driving source (24V DC) input
Servo ON (SON) input
(Note 1)
Status LEDs for Driver
Servo ON (SYS*) output
Movement signal (ST0) input
Home return completion
(HEND) output
Backward end position
detection (LS0) output
Backward end point positioning
completion (PE0) output
Actuator operation
Note 1 When the servo control is set to “Use” in the initial setting, the servo is turned ON by
means of inputting the SON signal.
Note 2 Input the movement command after having a delay time of 1.6sec or more for the
magnetic pole phase detection of the motor at the first servo-on input after the power is
turned ON. In the second time or later, make the delay time of 60ms or more.
Note 3 If the mode is set to “MANU” for the home position operation in the initial setting, the
home-return operation is performed when the movement command (ST0) is turned ON
first and positioning at ST0 with the signal afterwards.
If the home operation is set to “AUTO”, the actuator performs automatic home return
after the servo is turned ON.
Warning: Executing a servo ON when the actuator is position very close to a mechanical
end may cause the magnetic pole phase detection operation to malfunction and
reporting of the magnetic pole unconfirmed or excitation detection errors.
Always move the actuator physical position away from the mechanical end before
executing the servo ON command.
1.6sec or less
(Note 2)
20ms (TYP)
Home return
(Note 3)
Mechanical end
Home
position
Forward end position (Single Solenoid System)
Backward end position (Double Solenoid System)