8 control signals for sep i/o mode – IAI America MSEP User Manual
Page 134
3.4 Fieldbus
Type
Address Map
126
3.4.8
Control Signals for SEP I/O Mode
This is an operation mode same as when using PIO (24V input and output).
Set the position data from a teaching tool such as the RC PC software.
The number of movement points available in the operation depends on the operation pattern
(PIO pattern) input in the initial setting.
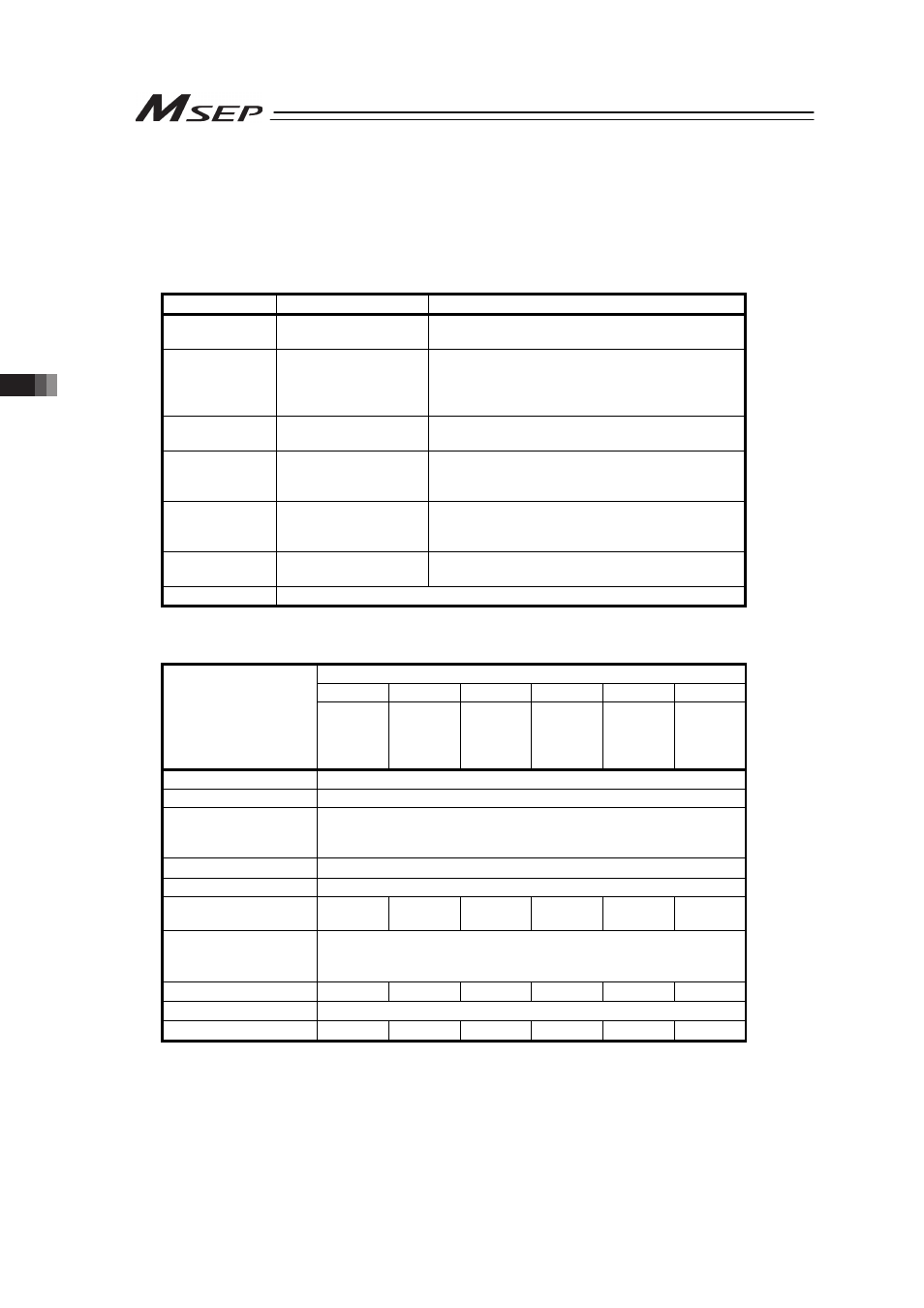
The I/O specifications for the operation pattern are described as follows
PIO Pattern
Operation Details
I/O Type
0
Point-to-Point
Movement
2 positioning points, pause available
1
Movement Speed
Setting
2 positioning points, pause available
Speed setting can be changed during a
movement between the two types already
registered
2
Target Position
Change
2 positioning points, pause available
Target position can be changed for an operation
3
2-Input, 3-Point
Movement
3 positioning points, no pause available
Specify the movement position with a combination
of two signals
4
3-Input, 3-Point
Movement
3 positioning points, no pause available
Specify the movement position with a combination
of three signals
5
Automatic Back and
Forth Operation
2 positioning points, pause available
Movement is made repeatedly between 2 points.
6
Cannot be used.
The ROBO Cylinder functions capable to control in this mode are as described in the table
below.
Operation Pattern (PIO Pattern)
0
1
2
3
4
5
ROBO cylinder function Point-to-
Point
Movement
Movement
Speed
Setting
Target
Position
Change
2-Input,
3-Point
Movement
3-Input,
3-Point
Movement
Automatic
Back and
Forth
Operation
Home-return operation
{
(Note 1)
Positioning operation
{
Speed and
acceleration/decelerati
on setting
{
Pitch feed (inching)
u
Pressing operation
{
Speed change during
movement
u
{
u
u
u
u
Operation at different
acceleration and
deceleration
{
Pause
{
{
{
u
u
{
Zone signal output
u
Target Position Change
u
u
{
u
u
u
(Note1) Home-return operation is performed at the first movement (ST0) if MANU is selected in
the initial setting. Home-return operation is performed at the first servo-on after the
power is turned ON if AUTO is selected.