IAI America MSEP User Manual
Page 173
3.8 I/O Signal Controls and Function
165
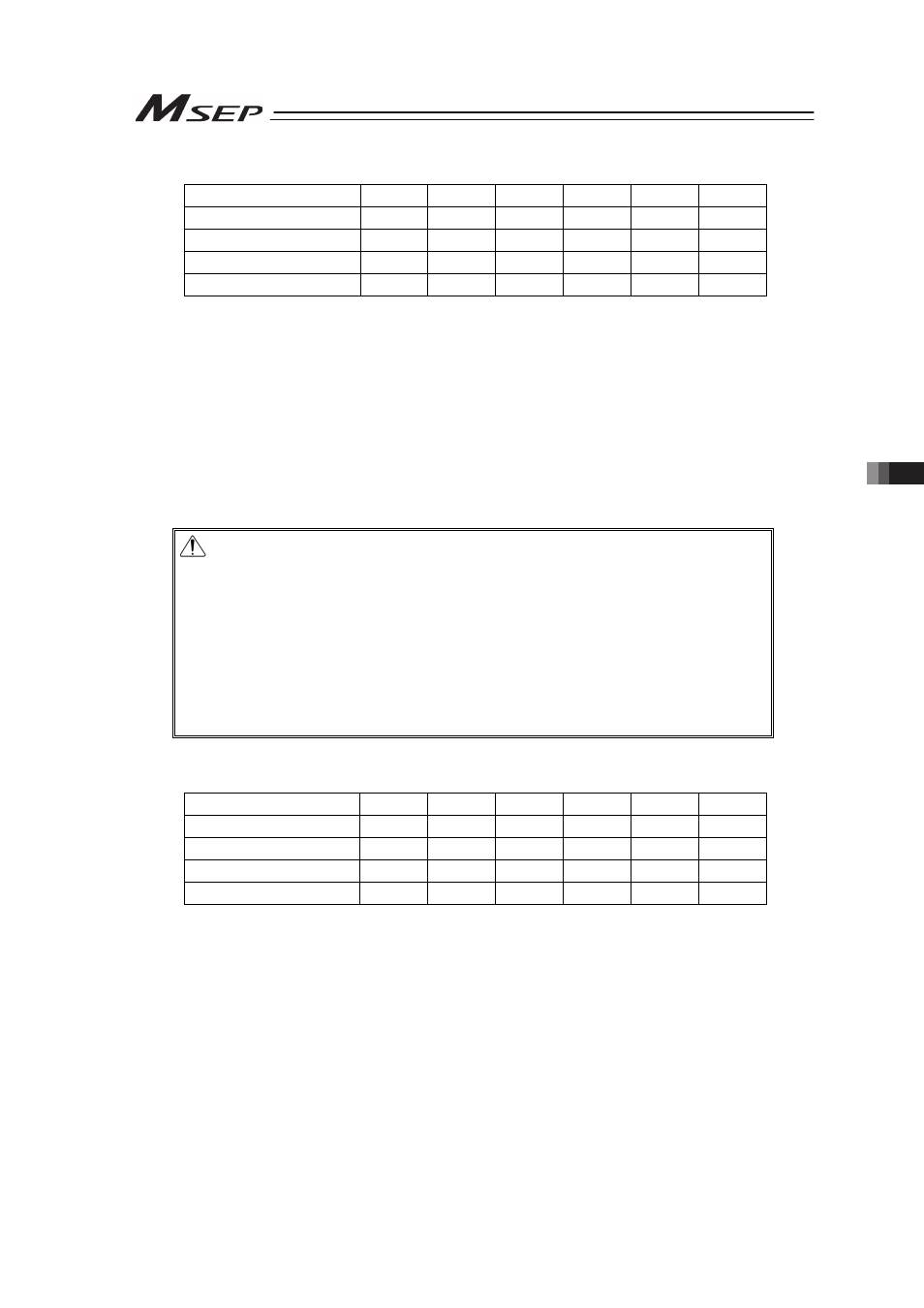
[4] Movement Command and Positioning Complete Signal (ST0 to ST2, PE0 to PE2)
PIO Signal
ST0
ST1
ST2
PE0
PE1
PE2
Operation Pattern 0 to 2
{
{
u
{
{
u
Operation Pattern 3
{
{
u
{
{
{
Operation Pattern 4
{
{
{
{
{
{
Operation Pattern 5
u
u
u
{
{
u
Ŷ Control method
1) When start signal ST* is turned ON, the actuator starts acceleration based on the data in the
specified position table for positioning to the target position.
2) Current Position No. PE* of the commanded position turns ON once the positioning is
complete.
3) Once PE* Signal turns ON, turn OFF ST* Signal.
4) Current Position No. PE* turns ON if the remaining movement amount is in the range of the
positioning width.The current position number PE* Signal will be kept on once it is turned ON
unless the start signal ST* is turned back ON, servo is turned OFF
(Note)
or the actuator is out
of the positioning width width range
(Note)
. When the pause signal *STP is turned OFF in this
condition, the current position number PE* Signal will also be turned OFF.
Caution: (1) If the ST* signal is turned ON for the position after completion of
positioning, both the PE* and PEND signals remain ON.
(2) The PE* signals is set to ON in the positioning width zone.
Accordingly, they may be turned ON under operation of the actuator
if a large positioning width is set.
(3) Interlock should be taken so that two or more ST* signals aren't set
to ON simultaneously.
• Entering the ST* signal of another position during positioning is
invalid. If the ST* signal of another position is turned ON during
positioning, the operation is terminated after the completion of the
positioning being operated.
[5] Positioning (ST0 to ST2, LS0 to LS2)
PIO Signal
ST0
ST1
ST2
LS0
LS1
LS2
Operation Pattern 0 to 2
{
{
u
{
{
u
Operation Pattern 3
{
{
u
{
{
{
Operation Pattern 4
{
{
{
{
{
{
Operation Pattern 5
u
u
u
{
{
u
Ŷ Control method
1) When start signal ST* is turned ON, the actuator starts acceleration based on the data in the
specified position table for positioning to the target position.
2) At the completion of positioning, position detection output LS* of the specified position is
turned ON.
3) Position detection output LS* is turned ON if the remaining moving distance enters into the
positioning width. LS* is set to ON if the current position is located within the positioning
width zone or OFF if the current position is located out of the positioning width zone (the
same situation occurs in the servo OFF status).
4) If the input signal method is set to continuous power supply in the initial setting, keep ST*
Signal ON until the actuator moves to another position, and turn it OFF at next ST* Signal. If
it is turned OFF with LS* Signal, the actuator decelerates and stops from the point where it
gets into the positioning width range, thus may not reach the target position. In continuous
operation, turn ON the next ST* signal by setting the positioning width within the required
precision range or setting the period taken from detection of the LS* signal to reaching the
target position.