3 alarm codes for driver board (each axis) – IAI America MSEP User Manual
Page 235
Chapter 6
Troubleshooting
227
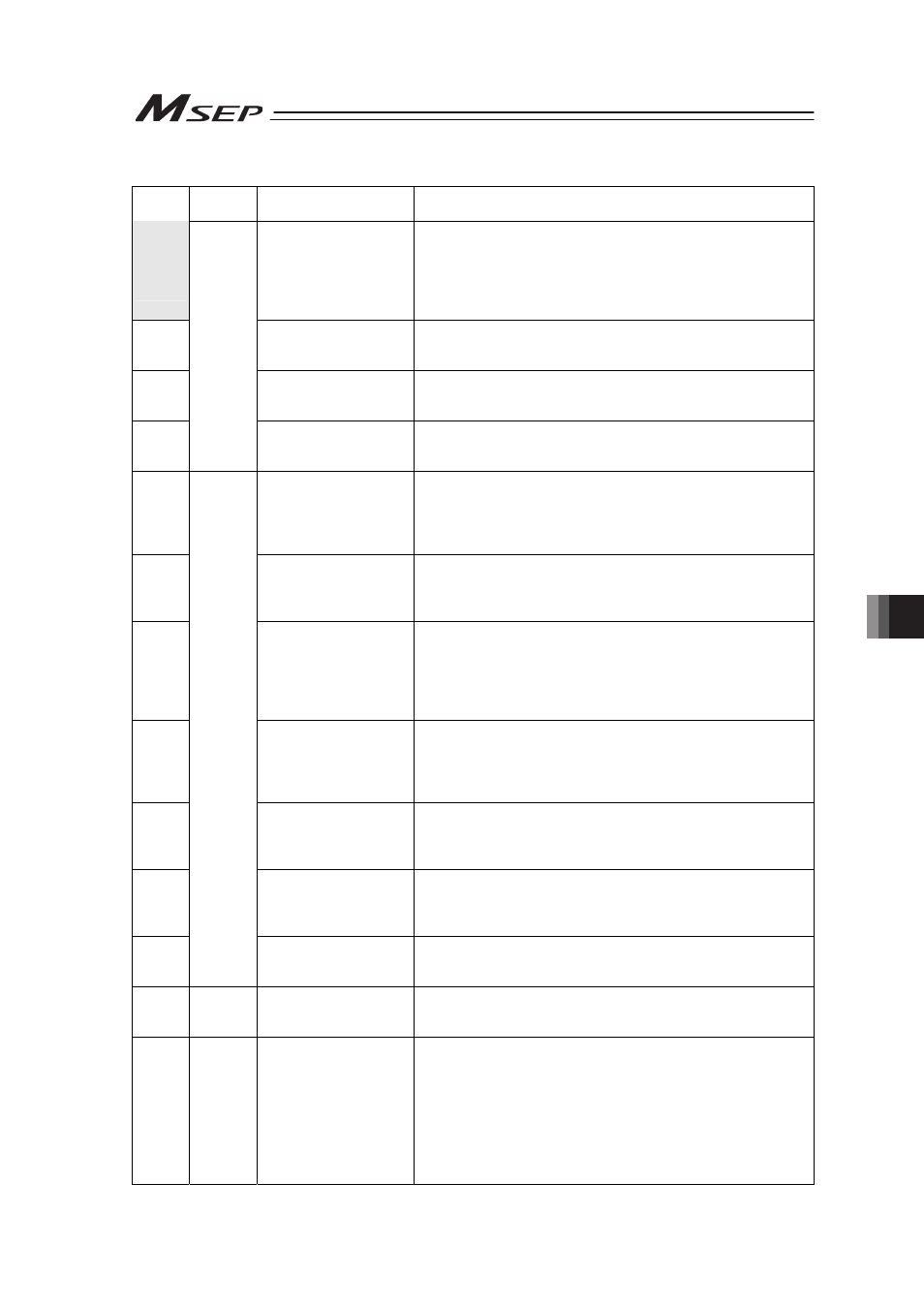
6.4.3
Alarm Codes for Driver Board (Each Axis)
Alarm
Code
Alarm
Level
Alarm Name
Cause/Treatment
048
Servo
motor
Only
Driver overload alarm
Cause
: There is a risk of overload with the current operation
condition.
This alarm keeps its status until a reset is
conducted.
Treatment : Lower the setting of acceleration/deceleration. Also,
increase the frequency of pause.
04E
Exceeded movement
count threshold
Cause
: The total number of the operation times exceeded
the value set in Parameter No.26 “Total Movement
Count Threshold”.
04F
Exceeded operated
distance threshold
Cause
: The total number of the operation distance
exceeded the value set in Parameter No.27 “Total
Operated Distance Threshold”.
06B
Message
Maintenance
information data error
Cause
: The maintenance information (total movement
count, total operated distance) is lost.
Treatment : Please contact IAI.
080
Move command in servo
OFF
Cause
: A move command was issued when the servo is
OFF.
Treatment : Issue a movement command after confirming the
servo is ON (servo ON signal (SV) or position
complete signal (PEND) is ON).
082
Position command in
incomplete home return
Cause
: A position move command was issued before home
return was completed.
Treatment : Issue a command after confirming that home return
has been completed (HEND) is ON.
083
Numerical command in
incomplete home return
Cause
: An absolute position command was issued by
numerical specification before home return was
completed (direct command from Field Network).
Treatment : Issue a numeric specification after performing home
return operation and confirming the complete signal
(HEND).
084
Absolute position move
command when home
return is not yet
completed
Cause
: A move command was issued when home return
was still in progress.
Treatment : Issue a movement command after performing home
return operation and confirming the complete signal
(HEND).
085
Position No. error during
movement
Cause
: A non-existing (invalid) position number was
specified in the positioner mode.
Treatment : Check the position table again and indicate an
effective position number.
090
Software reset during
servo ON
Cause
: A software reset command was issued when the
servo was ON.
Treatment : Issue a software reset command after confirming
that the servo is OFF (SV signal is 0).
091
Operation
release
Position No. error in
teaching
Cause
: The position number out of the available range was
selected in the teaching.
Treatment : Select the position number from 255 or smaller.
0A1
Cold start
Parameter data error
Cause
: The data input range in the parameter area is not
appropriate.
Treatment : Change the value to the appropriate one.
0A2
Operation
release
Position data error
Cause
: 1) A move command was input when no target
position was set in the “Position” field of a
position No. in the position table.
2) The value of the target value in the “Position”
field exceeded the Parameter No.15 “Soft limit
set value”.
Treatment : 1) Set the target position.
2) Change the target position value to the one
within the soft limit set value.