5] speed loop proportional gain (parameter no.5), 6] speed loop integral gain (parameter no.6) – IAI America MSEP User Manual
Page 214
Chapter 5 I/O Parameter
206
[5] Speed loop proportional gain (Parameter No.5)
No.
Name
Symbol
Unit
Input Range
Default factory
setting
5 Speed loop proportional gain
VLPG
–
1 to 27661
In accordance
with actuator
This parameter determines the response of the speed control loop. When the set value is
increased, the follow-up ability to the speed command becomes better (the servo-motor
rigidity is enhanced). The higher the load inertia becomes, the larger the value should be set.
However, excessively increasing the setting will cause overshooting or oscillation, which
facilitates producing the vibrations of the mechanical system.
When the set value is high (over-shoot)
When the set value is low
Speed
Time
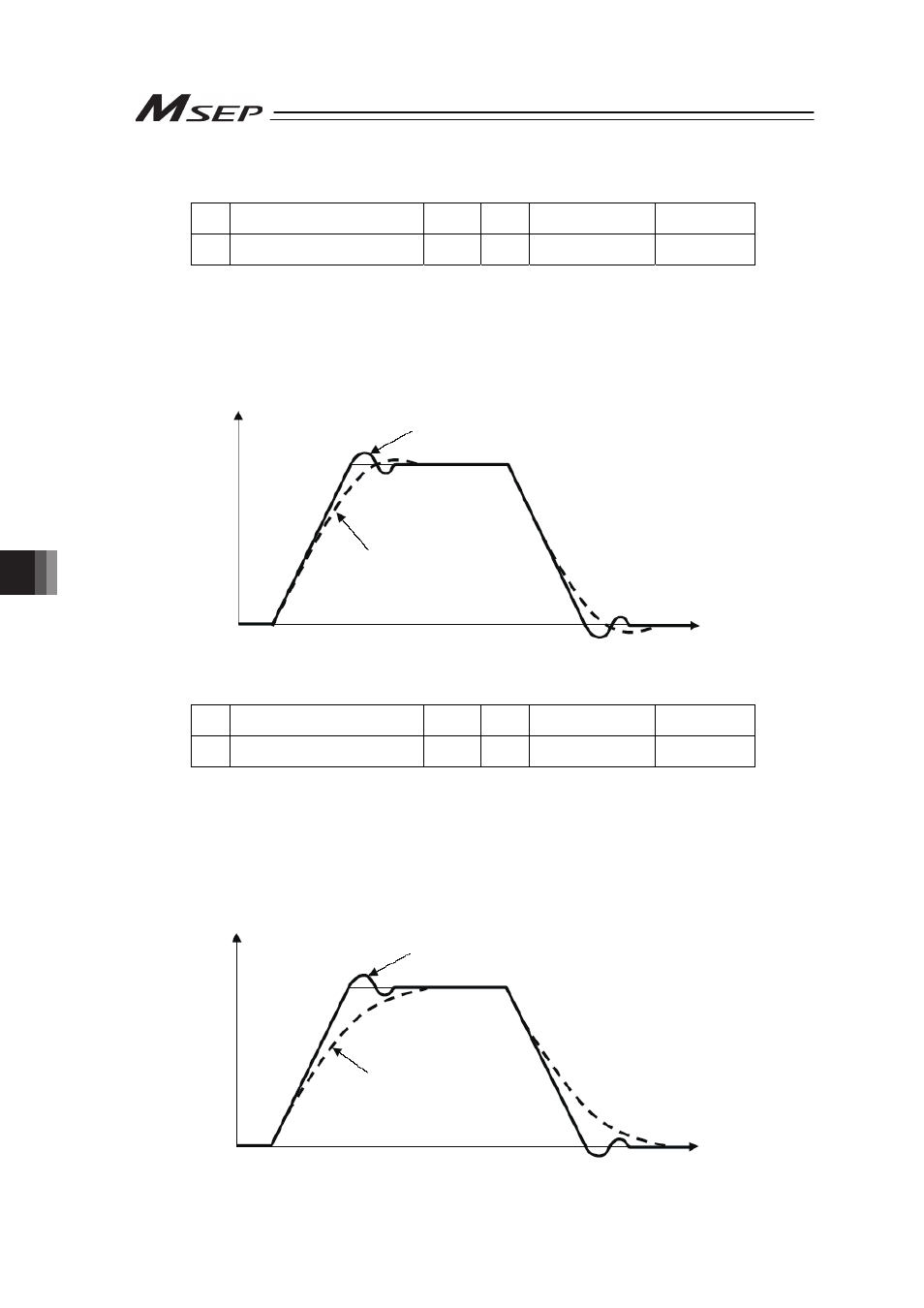
[6] Speed loop integral gain (Parameter No.6)
No.
Name
Symbol
Unit
Input Range
Default factory
setting
6 Speed loop integral gain
VLPT
–
1 to 217270
In accordance
with actuator
Any machine produces friction. This parameter is intended to cope with deviation generated
by external causes including friction. Increasing the setting value improves the reactive force
against load change. That is, the servo rigidity increases. However, increasing the parameter
value excessively may make the gain too high, which then cause the machine system to be
vibrated due to over-shoot or shaking.
Tune it to obtain the optimum setting by watching the speed response.
ᴾ
When the set value is high (over-shoot)
When the set value is low
Speed
Time