1 i/o parameter list, Chapter 5 i/o parameter – IAI America MSEP User Manual
Page 210
Chapter 5 I/O Parameter
202
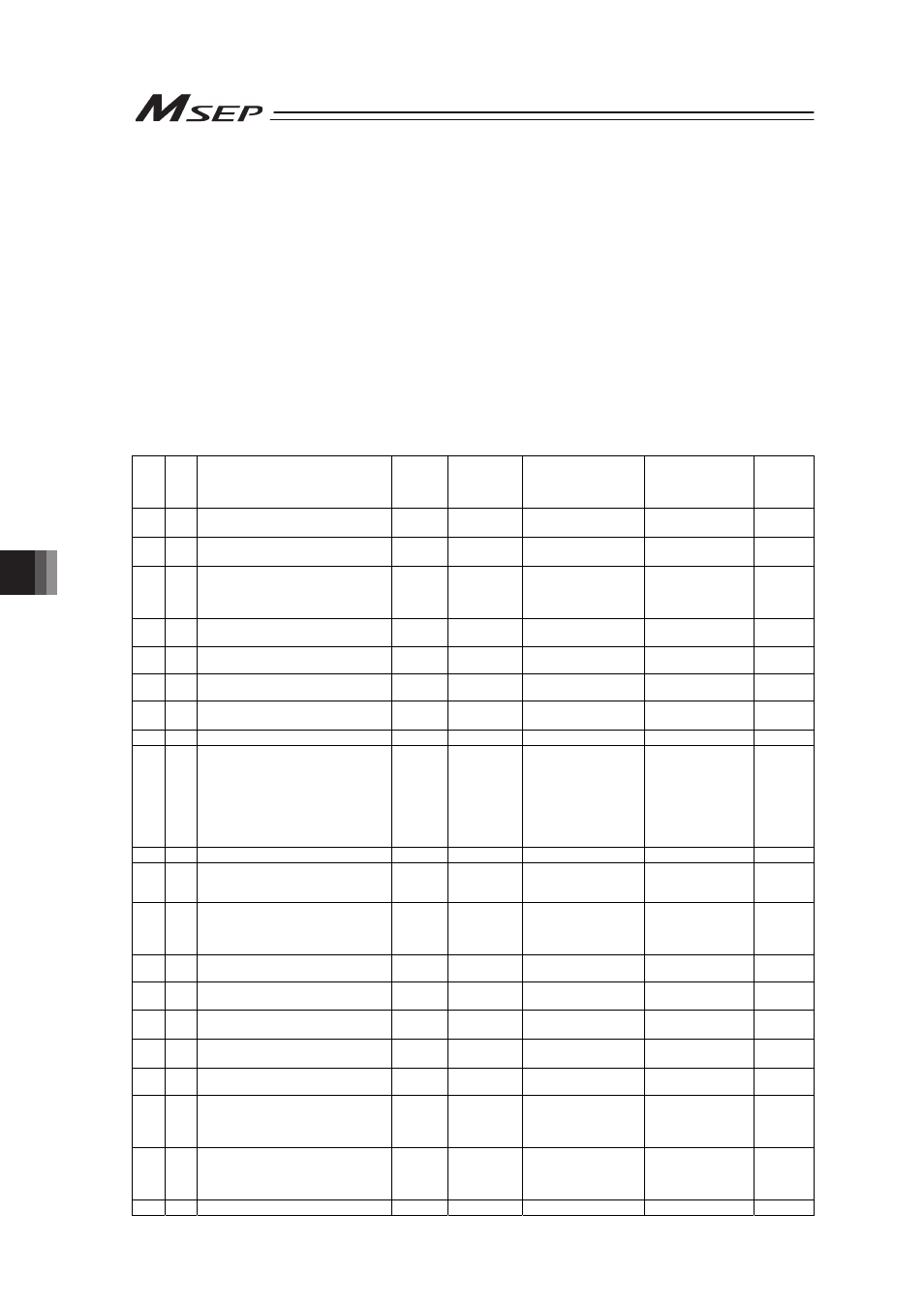
5.1 I/O Parameter List
The categories in the table below indicate whether parameters should be set or not. There are
five categories as follows:
A : Check the settings before use.
B : Use parameters of this category depending on their uses.
C : Use parameters of this category with the settings at shipments leaving unchanged as a
rule. Normally they may not be set.
D : Parameters of the category are set at shipment in accordance with the specification of the
actuator. Normally they may not be set.
E : Parameters of the category are exclusively used by us for convenience of production.
Changing their settings may not only cause the actuator to operate improperly but also to
be damaged. So, never change the setting of the parameters.
Category do not appear on the teaching tool.
Also, the unused parameter numbers are not mentioned in the list.
No.
C
at
eg
or
y
Name
Symbol
Unit
(Note 1)
Input Range
Default factory setting Relevant
sections
1
A Positioning width
INP
mm
=
deg?
0.01 to 999.99
In accordance with
actuator
(Note 2)
5.2 [1]
2
B Jog speed
JOGV
mm/s
=
deg/s?
0.01 to In accordance
with actuator
In accordance with
actuator
(Note 2)
5.2 [2]
3
C Servo gain number
PLGO
–
For servo motor
0 to 15
For pulse motor
0 to 31
In accordance with
actuator
(Note 2)
5.2 [3]
4
C Torque filter time constant
TRQF
–
0 to 2500
In accordance with
actuator
(Note 2)
5.2 [4]
5
C Speed loop proportional gain
VLPG
–
1 to 27661
In accordance with
actuator
(Note 2)
5.2 [5]
6
C Speed loop integral gain
VLPT
–
1 to 217270
In accordance with
actuator
(Note 2)
5.2 [6]
7
C Press speed
PSHV
mm/s
=
deg/s?
1 to actuator's
max. pressing speed
In accordance with
actuator
(Note 2)
5.2 [7]
8
C Press & hold stop judgment period
PSWT
msec
0 to 9999
255
5.2 [8]
9
C Current limit value at stopping due to
miss-pressing
PSFC
–
0: 1) Current limit during
movement for
servo motor
2) Current limit during
stop for pulse
motor
1: Current limit value
during pressing
0
5.2 [1]
10
B Auto servo-motor OFF delay time
ASO1
sec
0 to 9999
0
5.2 [10]
11
B
Stop mode selection
(Note) Function specialized for pulse
motor
SMOD
–
0: Full stop
1: Servo stop
0
5.2 [11]
12
B
Current-limiting value at standstill
during positioning
(Note) Function specialized for pulse
motor
SPOW
%
1 to 70
35
5.2 [12]
13
C Current-limiting value during home
return
ODPW
%
Pulse motor: 0 to 100
Servo motor: 0 to 300
In accordance with
actuator
(Note 2)
5.2 [13]
14
B Automatic positioning execution waiting
time
ADWT
sec
0.01 to 60
0.01
5.2 [14]
15
A Soft limit
LIMM
mm
=
deg?
0.01 to 9999.99
Actual stroke on +
side
(Note 2)
5.2 [15]
16
C Home return offset level
OFST
mm
=
deg?
0.00 to 9999.99
In accordance with
actuator
(Note 2)
5.2 [16]
17
D Home return direction
ORG
–
0: Reverse, 1: Normal In accordance with
actuator
(Note 2)
5.2 [17]
18
B Simple absolute unit
ETYP
–
0: Enabled
(Incremental)
1: Disabled (Simple
Absolute Type)
In accordance with
specification at order
accepted
5.2 [18]
19
A Absolute battery retention time
AIP
days
0: 20 days
1: 15 days
2: 10 days
3: 5 days
2
5.2 [19]
20
B Position data change password
PASS
–
0000 to 9999
0000
5.2 [20]