3] servo gain number (parameter no.3), 4] torque filter time constant (parameter no.4) – IAI America MSEP User Manual
Page 213
Chapter 5 I/O Parameter
205
[3] Servo gain number (Parameter No.3)
No.
Name
Symbol
Unit
Input Range
Default factory
setting
3 Servo gain number
PLGO
–
For servo motor
0 to 15
For pulse motor
0 to 31
In accordance
with actuator
The servo gain is also called position loop gain or position control system proportion gain.
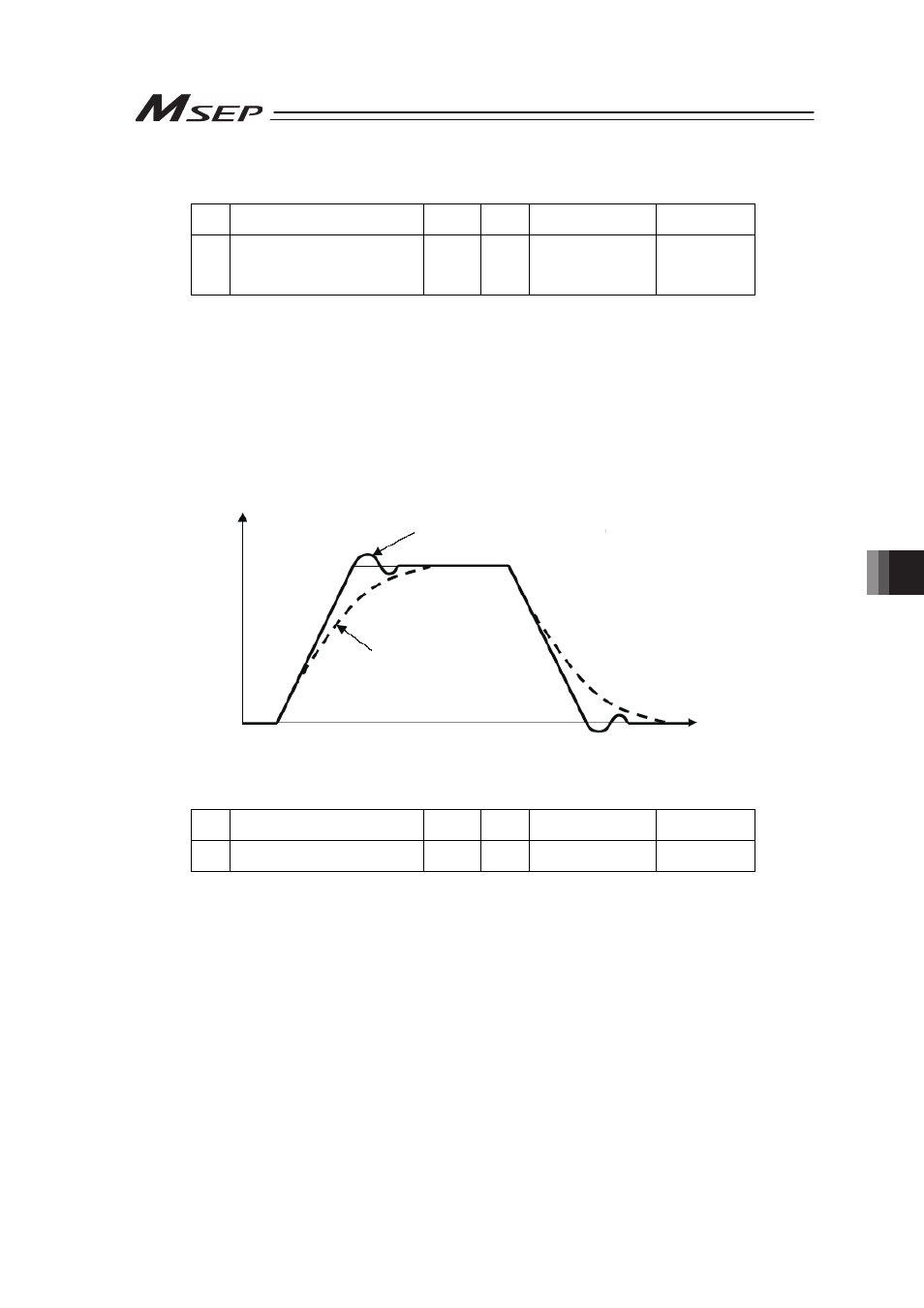
The parameter defines the response when a position control loop is used. Increasing the set
value improves the tracking performance with respect to the position command. However,
increasing the parameter value excessively increases the chances of overshooting.
When the set value is too low, the follow-up ability to the position command is degraded and
it takes longer time to complete the positioning.
For a system of low mechanical rigidity or low natural frequency (every object has its own
natural frequency), setting a large servo gain number may generate mechanical resonance,
which then cause not only vibrations and/or noises but also overload error to occur.
When the set value is high (over-shoot)
When the set value is low
Speed
Time
[4] Torque filter time constant (Parameter No.4)
No.
Name
Symbol
Unit
Input Range
Default factory
setting
4 Torque filter time constant
TRQF
–
0 to 2500
In accordance
with actuator
This parameter decides the filter time constant for the torque command. When vibrations
and/or noises occur due to mechanical resonance during operation, this parameter may be
able to suppress the mechanical resonance. This function is effective for torsion resonance of
ball screws (several hundreds Hz).