5 control signals for direct indication mode – IAI America MSEP User Manual
Page 120
3.4 Fieldbus
Type
Address Map
112
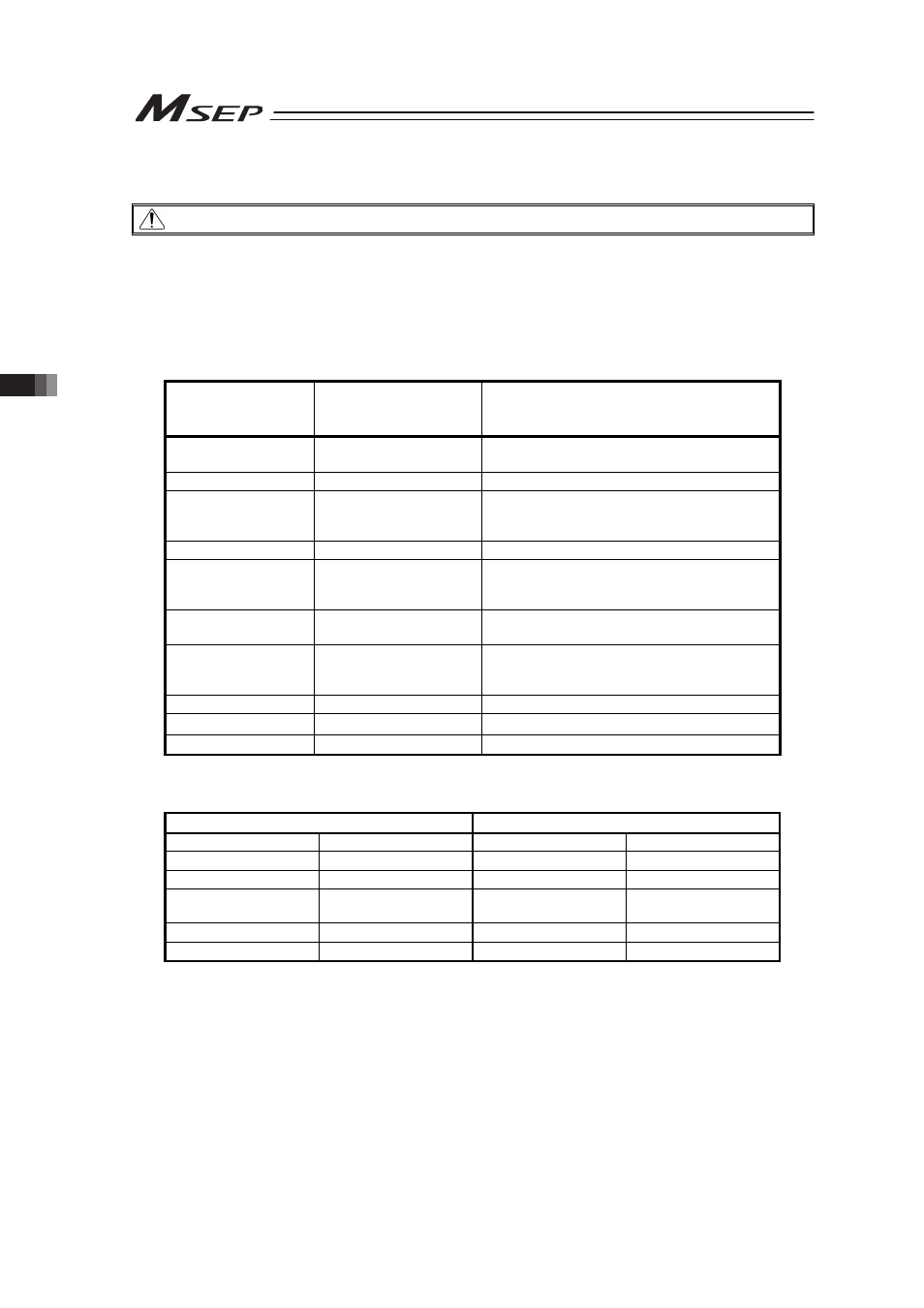
3.4.5 Control Signals for Direct Indication Mode
Caution: This mode is not applicable for CompoNet and MECHATROLINK.
This is an operation mode to indicate directly with values for the target position, positioning
width, speed, acceleration/deceleration and pressing current.
Set a value to each input and output data register. Set to the parameters when using the zone
signals.
The main functions of ROBO Cylinder capable to control in this mode are as described in the
following table.
䎃
ROBO cylinder
function䎃
{
: Direct control
ٌ
: Indirect control
u
: Disabled䎃
Remarks䎃
Home-return
operation
{䎃
Positioning operation
{䎃
Speed and
acceleration/
deceleration setting
{䎃
Pitch feed (inching)
{䎃
Pressing operation
{䎃
Selection can be made from the pressing
method same as CON type such as PCON and
that same as SEP type such as PSEP.
Speed change during
movement
{䎃
Operation at different
acceleration and
deceleration
u䎃
Pause
{䎃
Zone signal output
䦲䎃
Parameters must be set.
PIO pattern selection
u䎃
䎃
(1) PLC Address Composition
(m is PLC input and output top word address for each axis number)
PLC ĺ MSEP (PLC Output)
MSEP ĺ PLC (PLC Input)
Target Position
m to m+1
Current Position
m to m+1
Positioning Width
m+2 to m+3
Command Current
m+2 to m+3
Command Speed
m+4
Current Speed
m+4
Acceleration/
Deceleration
m+5
Cannot be used.
m+5
Pressing Current Limit
m+6
Alarm Code
m+6
Control Signal
m+7
Status Signal
m+7
[Refer to Section 3.4.2 for the address maps for each Fieldbus.]
䎃