Chapter 3 operation, 1 basic operation, 1 basic operation methods – IAI America MSEP User Manual
Page 77
Chapter 3 Operation
69
Chapter 3 Operation
3.1 Basic Operation
3.1.1
Basic Operation Methods
There are two ways for the operation; one is to control with PIO and the other with Fieldbus.
Check the model code described on the model code record card inserted on the front panel of
the unit to find which way is to be applied for your product. [Refer to 1.1.5]
Even though there are several types for an actuator, such as slider type, rod type, rotary type,
gripper type, etc., the method to control the operation is the same unless otherwise specified in
this manual.
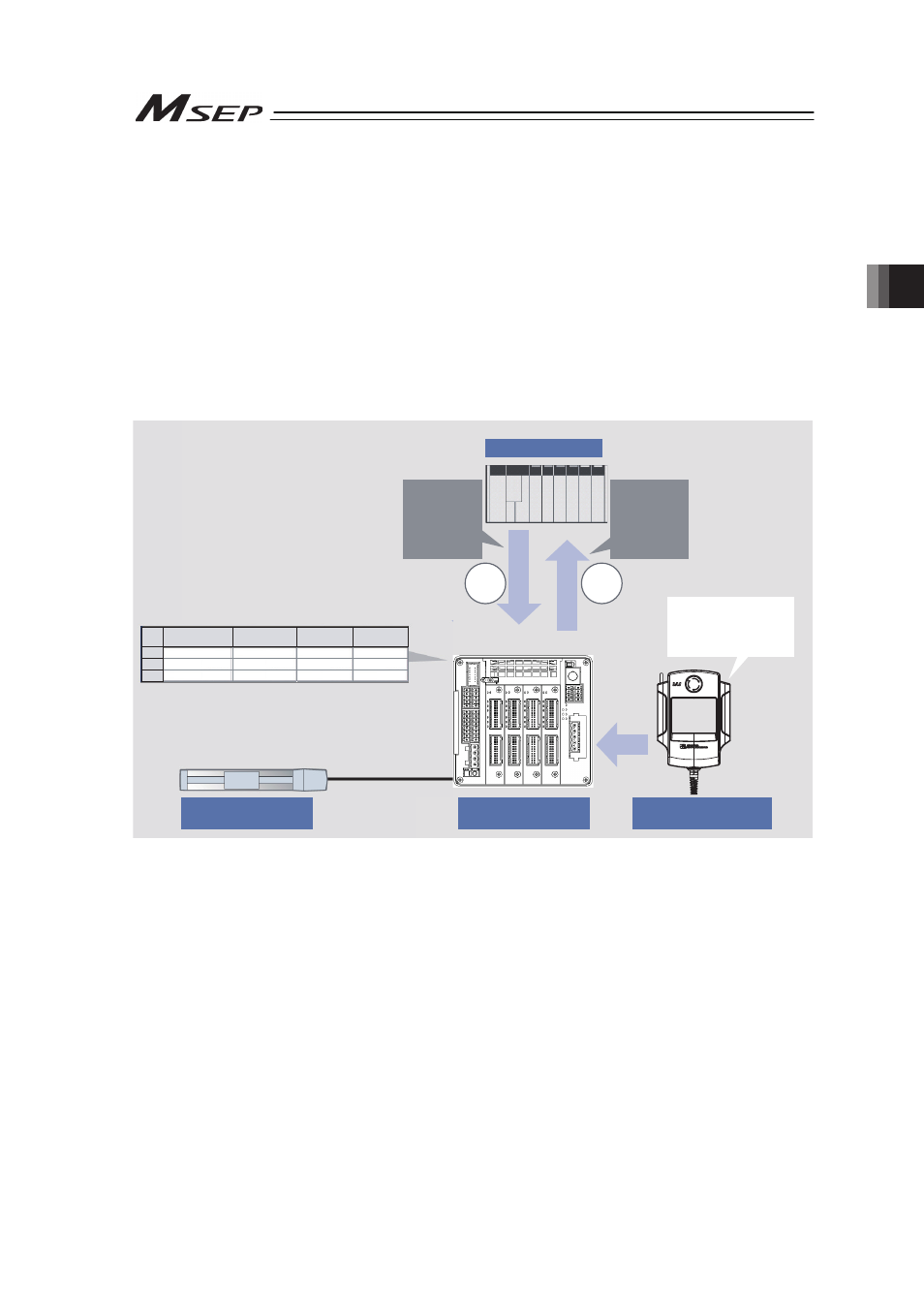
(1) Control with PIO
Edit Position
Table of
controller
Actuator
Controller
PLC
Teaching Tool
Complete
Signal
Signal
Signal
Move
Signal
Enter a data including
position, speed,
acceleration or
deceleration, etc.
No.
[G]
0
1
100.00
0.30
0.30
2
200.00
0.30
0.30
100.00
200.00
Acceleration Deceleration
Speed
[mm]
[mm/s]
[G]
Position
1) Conduct the settings for the target position (such as forward end or backward end), speed
and acceleration/deceleration data that are necessary to be filled in the position table using
a teaching tool such as PC software.
2) Turn ON the movement signal of the target position from PLC.
3) The actuator is placed at the proper coordinate value according to the positioning
information in the specified target position.
4) The complete signal or position detection signal is output once the positioning is complete.
That is all for the basic operation method to control with PIO.