Metrohm 916 Ti-Touch User Manual
Page 288
27.6 USB Sample Processor
■■■■■■■■■■■■■■■■■■■■■■
272
■■■■■■■■
916 Ti-Touch
NOTE
This dialog is accessible only if you have a Swing Head with robotic arm
attached to the Sample Processor.
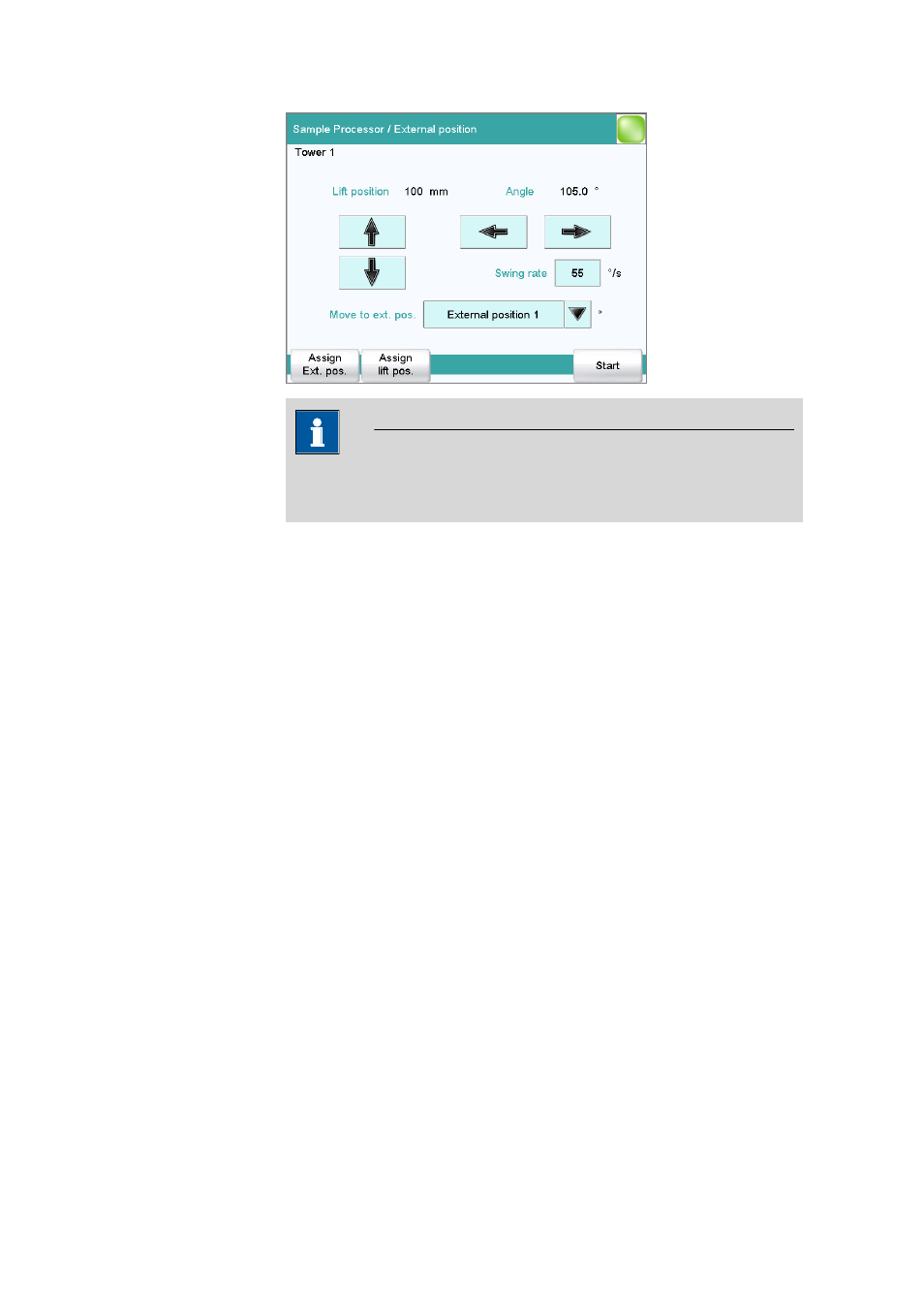
In the dialog Sample Processor / External position, you can swivel the
robotic arm to an external position outside of the sample rack. As with the
rack positions, here you can also define up to four frequently used exter-
nal positions as specific positions. You can assign specific lift positions to
these positions, analogous to the rack positions.
External positions are required if you have, for example, a measuring ves-
sel or a titration cell mounted in addition to the rack.
Lift position
Current lift position.
Angle
Current angle position of the robotic arm.
[
⇧]
Only enabled, when the robotic arm has been moved to a specific external
position with [Start].
Continuously move the lift upwards as long as the button is pressed
down. The lift rate used is defined in the dialog Sample Processor / Lift.
[
⇩]
Only enabled, when the robotic arm has been moved to a specific external
position with [Start].
Continuously move the lift downwards as long as the button is pressed
down. The lift rate used is defined in the dialog Sample Processor / Lift.