5 electronic shaft function – IAI America XSEL-S User Manual
Page 93
Chapter 2 Operations
85
2.5 Electronic Shaft Function
Synchronizes to the specified master axis, and it is a function that slave axis follows the specified
gear ratio.
Movement amount of slave axis is calculated by the formula below.
Gear Ratio Numerator
Slave Axis Movement Amount = Master Axis Movement Amount x
Gear Ratio Denominator
The gear ratio numerator can be specified in the range from -10000 to -1 or 1 to 10000 and the
denominator from 1 to 10000. If a negative value is specified to the gear ratio numerator, slave axes
movement is in the direction opposite to the master axis. This operation is enabled using the XSFS
command. [Refer to the explanation of the XSFS command in Chapter 3 “Programs.”]
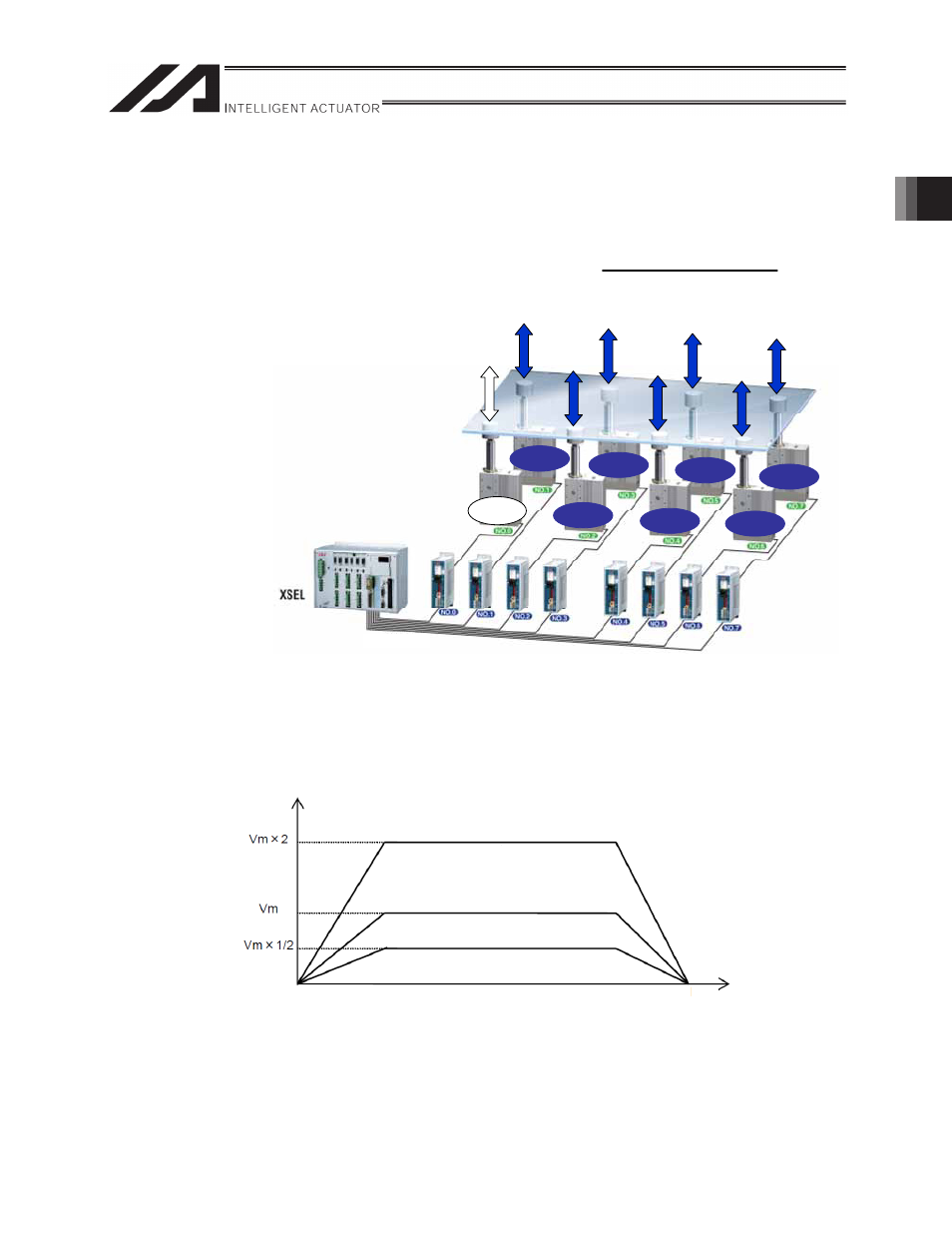
Figure 2.5.1 Electronic Shaft Movement
What is the electronic shaft function?
This function causes a
“slave axis”
to
synchronize with a
“master axis”
at a
specified gear ratio.
If the gear ratio is 1:1, all slave axes
perform the same movement as the main
axis as shown in the figure to the right.
X1 (gear ratio) =
Slave axis
Slave axis
Slave axis
Slave axis
Slave axis
Slave axis
Slave axis
Master
axis
Pulse train
Speed
Slave axis (gear ratio 2:1)
Master axis
Slave axis (gear ratio 1:2)
Time