IAI America XSEL-S User Manual
Page 150
Chapter 4 Parameters
142
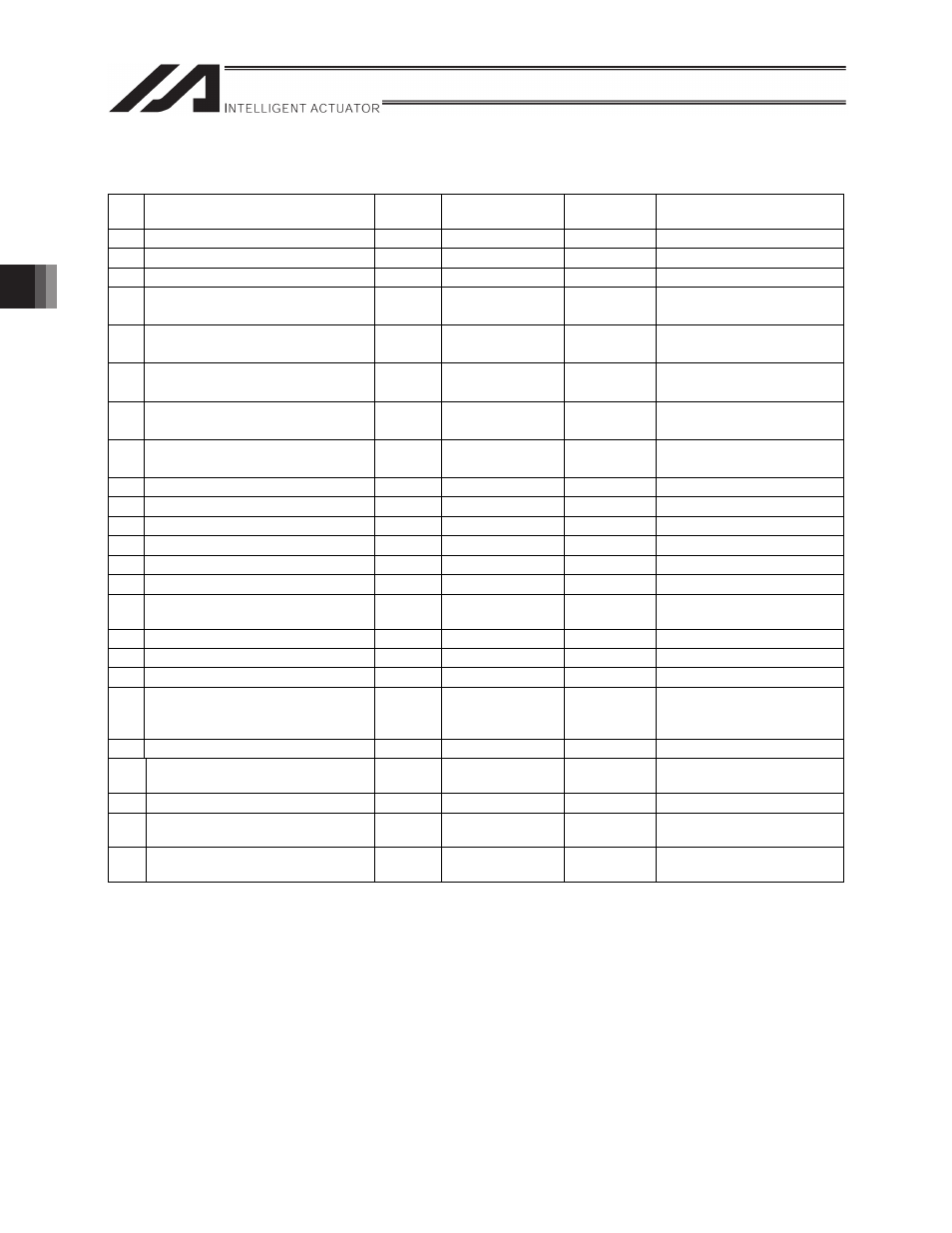
4.1.5 Extension Motion Control Board Output Channel Parameters
No.
Parameter name
Unit
Input range
Default value
(reference)
Reference section
1 Channel usage method
-
0~1
0
4.2 [12]
2 Pulse output mode
-
0~2
1
4.2 [13]
3 Pulse output mode polarity
-
0~1
0
4.2 [14]
4 (For extension)
-
0H~
FFFFFFFFH
00000000H
-
5 Number of pulses per one
encoder rotation
pulse
1~
99999999
16384
4.2 [15]
6 Screw lead
0.001mm
-99999999~
99999999
10000
4.2 [16]
7 Software limit +
0.001mm
-99999999~
99999999
1000
4.2 [17]
8 Software limit -
0.001mm
-99999999~
99999999
0
4.2 [18]
9 Software limit margin
0.001mm
0~9999
300
4.2 [19]
10 Electronic gear numerator
-
1~99999999
1
4.2 [20]
11 Electronic gear denominator
㪄㩷
1~99999999
1
4.2 [20]
12 Maximum speed
OOUGE
1~9999
100
4.2 [21]
13 Maximum acceleration
0.01G
1~300
30
4.2 [22]
14 Maximum deceleration
0.01G
1~300
30
4.2 [23]
15 Deceleration at the end of
synchronous movement
0.01G
1~30
30
4.2 [24]
16 VLMX speed
mm/sec
1~9999
100
4.2 [25]
17 Reserved by system
-
1~99999999
500
-
18 Control device No.
-
0~6
0
4.2 [26]
19
to
30
(For extension)
-
0H~FFFFFFFFH 00000000H
-
31 Servo ON completion check time 100 msec
1~999
150
4.2 [27]
32 Home return completion check
time
sec
1~9999
150
4.2 [28]
33 Positioning completion check time 100 msec
1~999
10
4.2 [29]
34 Servo ON signal OFF error
detection delay time
msec
1~5000
msec
4.2 [30]
35 Home return completion status
OFF waiting time
msec
1~99
msec
4.2 [31]