Metrohm tiamo 1.3 Manual User Manual
Page 754
728
Configuration
Offset from the center of the tower to the center of the robotic arm, which
does not normally need to be altered. If a robotic arm must be mounted on
the tower so that it is offset to one side then this value can be determined
by the service technician during rack adjustment.
Swing direction
+
(clockwise rotation), – (counterclockwise rotation)
The swing direction of the robotic arm depends on the type of robotic arm.
For a 2-tower model the robotic arm at Tower 1 must swing to the right, i.e.
"–" and that at Tower 2 must be mounted "
+
" so that it swings to the left.
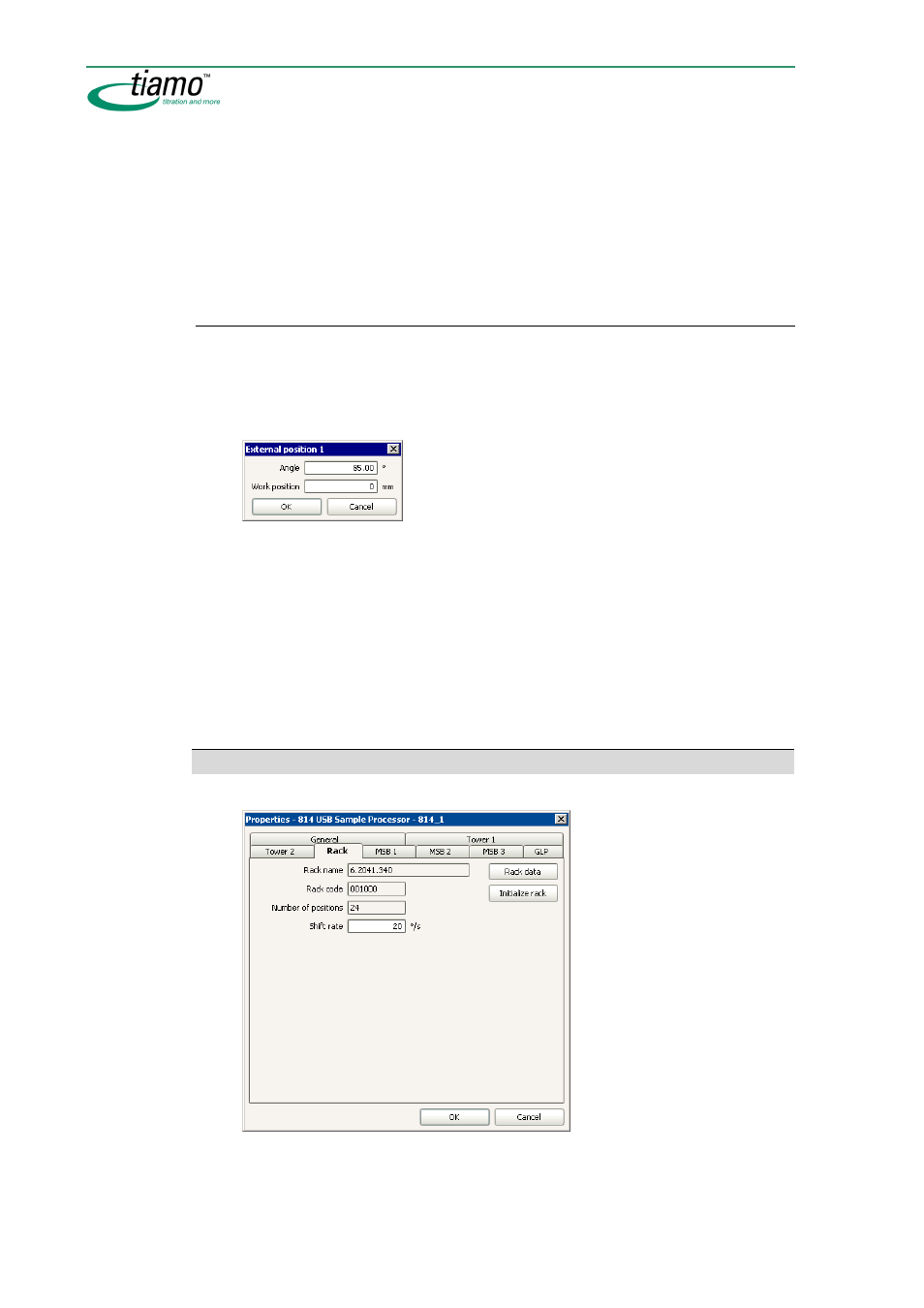
External position
In the dialog window
External position #
a swing angle and a specific work position
can be defined for each external position. Shift and rinse positions can only be de-
fined for all 4 external positions together (see Tower # properties). No special po-
sition can be defined for external positions.
Angle
Offset...[ 60.00 °]...(Offset + max. swing range)
Definition of the turning angle for the selected external position. The offset
is made up of a design-dependent angle (approx. 8-9°) together with the
robotic arm offset from the Robotic arm properties (see Robotic arm
properties). The maximum swing range is also defined under Robotic arm
properties.
Work position
[ 0 ] ... 235 mm
Definition of the work position for the selected external position.
Rack
On the tab
Rack
the rack-specific data of the attached rack are shown.
Rack name
Shows the name of the attached rack. If no rack is in position then "
-----
" will
be shown.