Metrohm tiamo 1.3 Manual User Manual
Page 753
Subwindow Devices
727
Rinse position
[ 0 ] ... 235 mm
Rinse position valid for all 4 external positions.
Open the dialog window
Robotic arm configuration
(see Robotic arm con-
figuration) in which the properties of the robotic arm of the swing head can
be edited.
Table for external positions
The properties for the 4 possible external positions for the swing head mounted
on the tower are shown in the table. The table cannot be edited directly.
External position
Number of the external position.
Angle [°]
Swing angle for external position.
Work position [mm]
Work position for external position.
Open the dialog window
External position #
(see External position) in which
the parameters for the external position selected in the table can be edited.
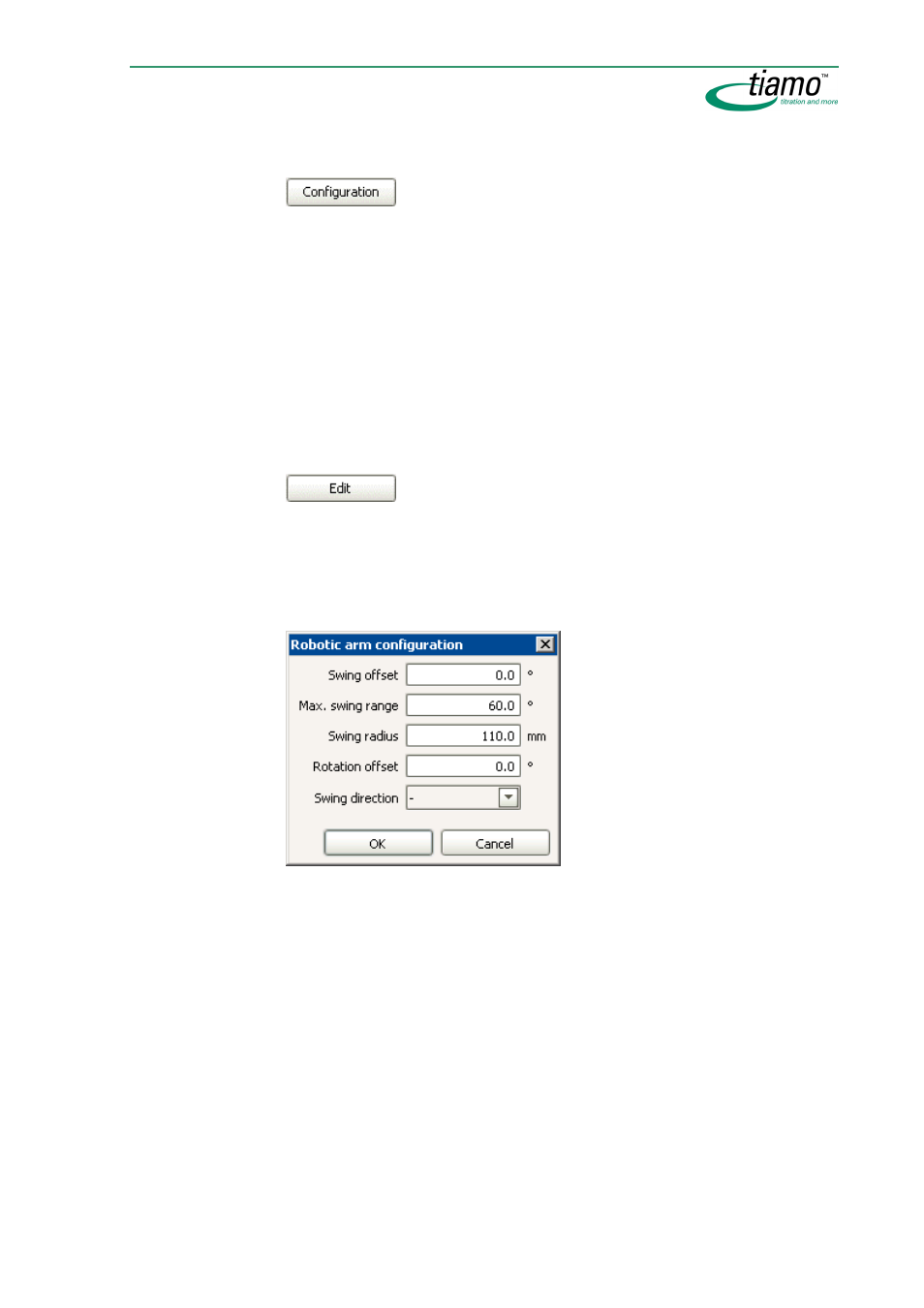
Robotic arm configuration
In the dialog window
Robotic arm configuration
specific settings can be made for
each robotic arm mounted on a swing head.
Swing offset
-270.0 ... [ 0.0 ] ... 270.0 °
Turning angle offset for specific robotic arm model. This value must be set
according to the leaflet supplied with the swing head.
Max. swing range
0.0 ... [ 60.0 ] ... 330.0 °
Maximum usable swing range for specific robotic arm model. Each robotic
arm model has a different value because of its construction. This value
must be set according to the leaflet supplied with the swing head and can
also be reduced if necessary.
Swing radius
30.0 ... [ 110.0 ] ... 300.0 mm
The swing radius depends on the length of the robotic arm and, together
with the axial distance, is the most important parameter for exact movement
to a rack position. This value must be set according to the leaflet supplied
with the swing head.
Rotation offset
-270.0 ... [ 0.0 ] ... 270.0 °