Part 1 specification, 3) profibus – IAI America REXT User Manual
Page 66
Part 1 Specification
Chapter 3 Gateway R unit
46
Part 1 Specification
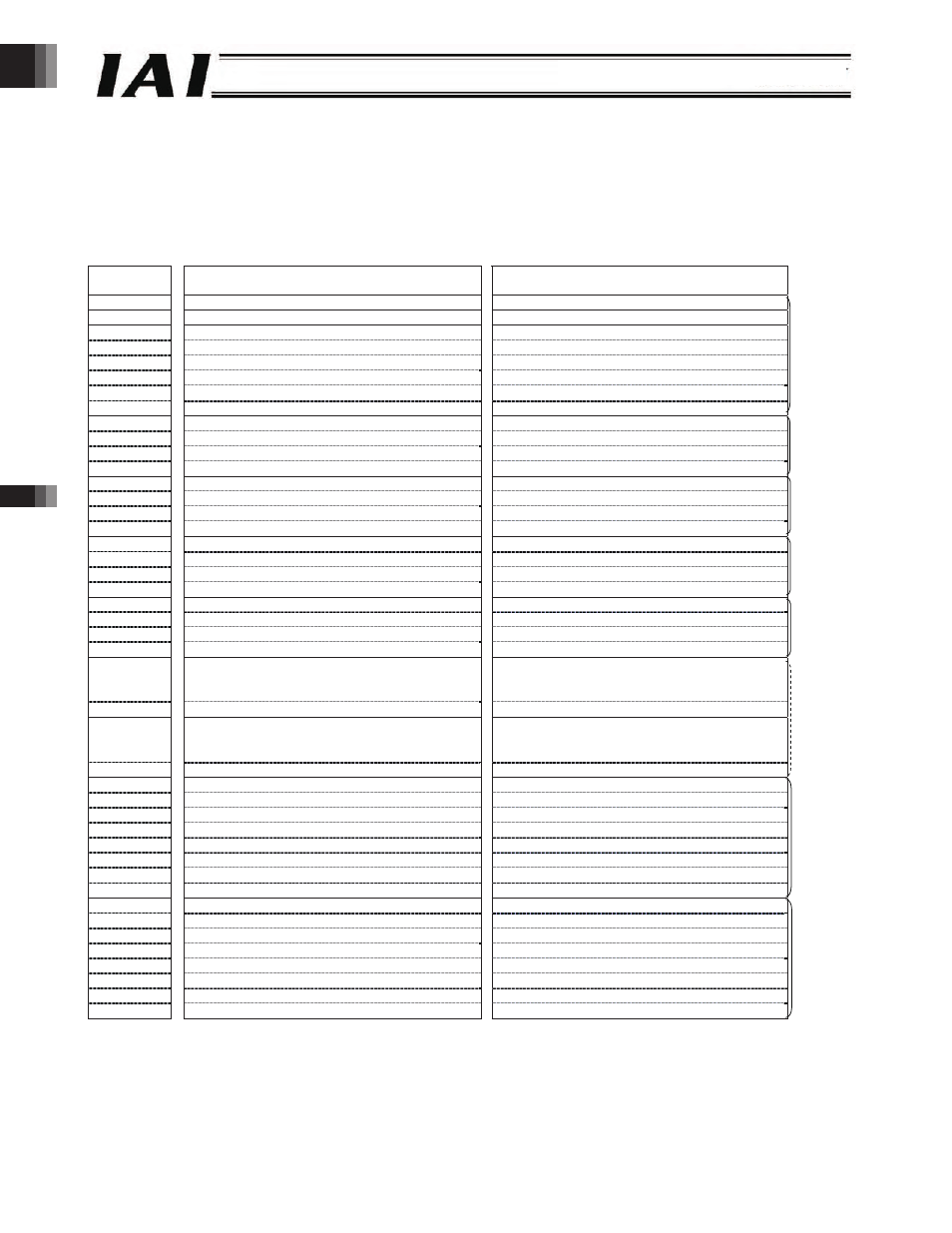
(3) Profibus
Example of Overall Profibus Address Configuration
(Positioner 1 mode/simple direct mode + Direct numerical specification mode)
An example of connecting 12 axes operating in the positioner 1 mode or simple direct mode and two axes operating in the
direct numerical specification mode is shown.
PLC output ROBONET
ROBONET PLC input
Relative
byte*
Upper byte
Lower byte
Upper byte
Lower byte
0
Gateway control signal 0
Gateway status signal 0
2
Gateway control signal 1
Gateway status signal 1
4
Request command
Response command
6
Data 0
Data 0
8
Data 1
Data 1
10
Data 2
Data 2
12
Data 3
Data 3
14
(Cannot be used)
(Cannot be used)
8-word
fixed area
16
(Axis 0) Position data specification (L)
(Axis 0) Current position data (L)
18
(Axis 0) Position data specification (H)
(Axis 0) Current position data (H)
20
(Axis 0) Command position number
(Axis 0) Completed position number
22
(Axis 0) Control signal
(Axis 0) Status signal
4 words
Positioner/
simple direct
mode
24
(Axis 1) Position data specification (L)
(Axis 1) Current position data (L)
26
(Axis 1) Position data specification (H)
(Axis 1) Current position data (H)
28
(Axis 1) Command position number
(Axis 1) Completed position number
30
(Axis 1) Control signal
(Axis 1) Status signal
4 words
31
(Axis 2) Position data specification (L)
(Axis 2) Current position data (L)
34
(Axis 2) Position data specification (H)
(Axis 2) Current position data (H)
36
(Axis 2) Command position number
(Axis 2) Completed position number
38
(Axis 2) Control signal
(Axis 2) Status signal
4 words
40
(Axis 3) Position data specification (L)
(Axis 3) Current position data (L)
42
(Axis 3) Position data specification (H)
(Axis 3) Current position data (H)
44
(Axis 3) Command position number
(Axis 3) Completed position number
46
(Axis 3) Control signal
(Axis 3) Status signal
4 words
78
(Axis 7) Control signal
(Axis 7) Status signal
110
(Axis 11) Control signal
(Axis 11) Status signal
4 words
112
(Axis 12) Position data specification (L)
(Axis 12) Current position data (L)
114
(Axis 12) Position data specification (H)
(Axis 12) Current position data (H)
116
(Axis 12) Positioning band specification (L)
(Axis 12) Current electrical current (L)
118
(Axis 12) Positioning band specification (H)
(Axis 12) Current electrical current (H)
120
(Axis 12) Speed specification
(Axis 12) Current speed data
122
(Axis 12) Acceleration/deceleration specification
(Cannot be used)
124
(Axis 12) Push-current limiting value
(Axis 12) Alarm code
126
(Axis12) Control signal
(Axis 12) Status signal
8 words
Direct
numerical
specification
mode
128
(Axis 13) Position data specification (L)
(Axis 13) Current position data (L)
130
(Axis 13) Position data specification (H)
(Axis 13) Current position data (H)
132
(Axis 13) Positioning band specification (L)
(Axis 13) Current electrical current (L)
134
(Axis 13) Positioning band specification (H)
(Axis 13) Current electrical current (H)
136
(Axis 13) Speed specification
(Axis 13) Current speed data
138
(Axis 13) Acceleration/deceleration specification
(Cannot be used)
140
(Axis 13) Push-current limiting value
(Axis 13) Alarm code
142
(Axis13) Control signal
(Axis 13) Status signal
8 words
* The relative byte indicates the relative byte address from the beginning of the gateway.
-66-