Part 1 specification – IAI America REXT User Manual
Page 148
Part 1 Specification
Chapter 3 Gateway R unit
124
Part 1 Specification
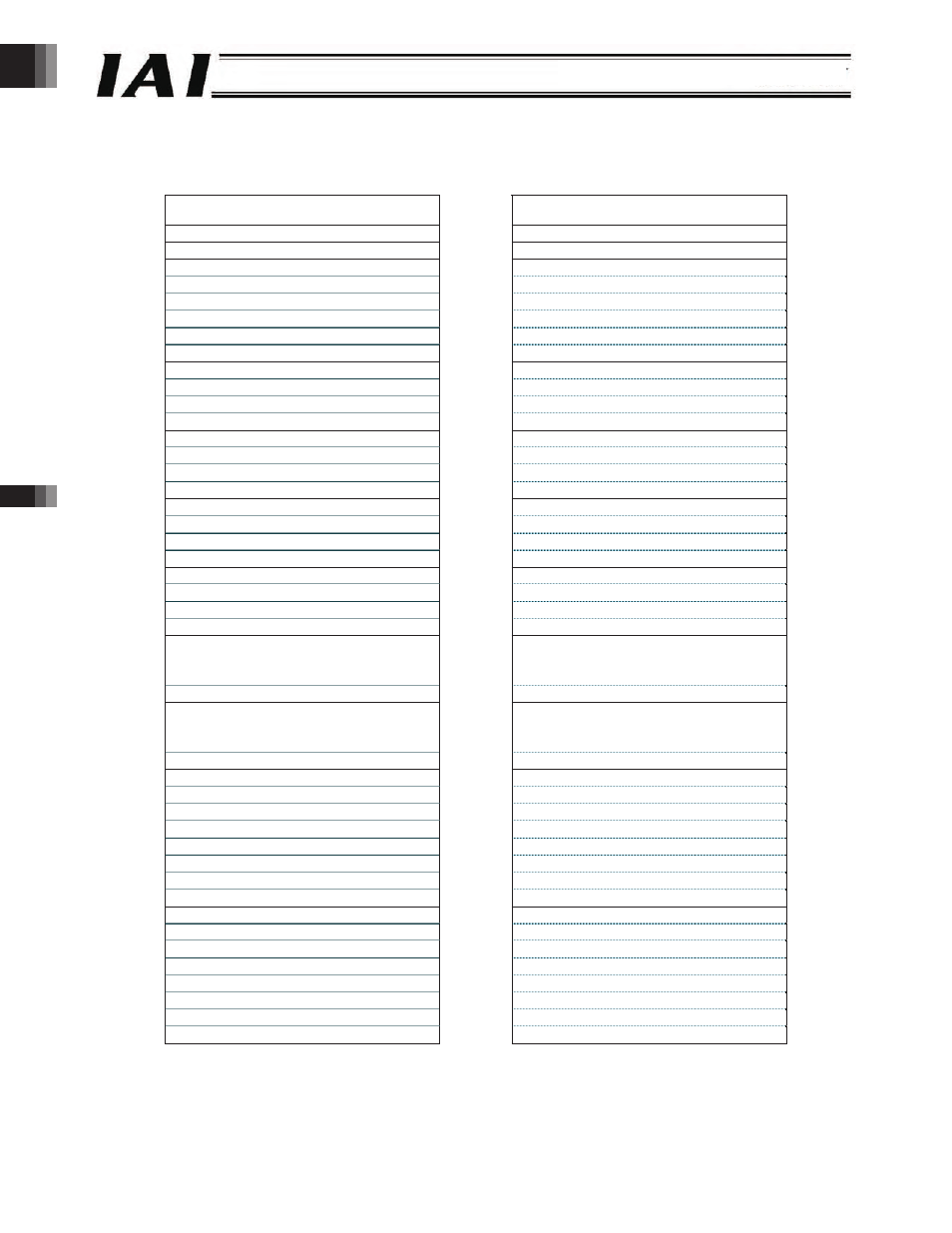
Example of Overall RS485SIO Gateway Address Configuration
An example of connecting 12 axes operating in the positioner 1 mode or simple direct mode and two axes operating in the
direct numerical specification mode is shown.
PLC output ROBONET
ROBONET PLC input
Register
address
Upper byte
Lower byte
Relative
byte
Upper byte
Lower byte
Register
address
F600*
Gateway control signal 0
0
Gateway status signal 0
F700*
F601
Gateway control signal 1
2
Gateway status signal 1
F701
F602
Request command
4
Response command
F702
F603
Data 0
6
Data 0
F703
F604
Data 1
8
Data 1
F704
F605
Data 2
10
Data 2
F705
F606
Data 3
12
Data 3
F706
F607
(Cannot be used.)
14
(Cannot be used.)
F707
F608
(Axis 0) Position data specification (L)
16
(Axis 0) Current position data (L)
F708
F609
(Axis 0) Position data specification (H)
18
(Axis 0) Current position data (H)
F709
F60A
(Axis 0) Command position number
20
(Axis 0) Completed position number
F70A
F60B
(Axis 0) Control signal
22
(Axis 0) Status signal
F70B
F60C
(Axis 1) Position data specification (L)
24
(Axis 1) Current position data (L)
F70C
F60D
(Axis 1) Position data specification (H)
26
(Axis 1) Current position data (H)
F70D
F60E
(Axis 1) Command position number
28
(Axis 1) Completed position number
F70E
F60F
(Axis 1) Control signal
30
(Axis 1) Status signal
F70F
F610
(Axis 2) Position data specification (L)
32
(Axis 2) Current position data (L)
F710
F611
(Axis 2) Position data specification (H)
34
(Axis 2) Current position data (H)
F711
F612
(Axis 2) Command position number
36
(Axis 2) Completed position number
F712
F613
(Axis 2) Control signal
38
(Axis 2) Status signal
F713
F614
(Axis 3) Position data specification (L)
40
(Axis 3) Current position data (L)
F714
F615
(Axis 3) Position data specification (H)
42
(Axis 3) Current position data (H)
F715
F616
(Axis 3) Command position number
44
(Axis 3) Completed position number
F716
F617
(Axis 3) Control signal
46
(Axis 3) Status signal
F717
F627
(Axis 7) Control signal
78
(Axis 7) Status signal
F727
F637
(Axis 11) Control signal
110
(Axis 11) Status signal
F737
F638
(Axis 12) Position data specification (L)
112
(Axis 12) Current position data (L)
F738
F639
(Axis 12) Position data specification (H)
114
(Axis 12) Current position data (H)
F739
F63A
(Axis 12) Positioning band specification (L)
116
(Axis 12) Current electrical current (L)
F73A
F63B
(Axis 12) Positioning band specification (H)
118
(Axis 12) Current electrical current (H)
F73B
F63C
(Axis 12) Speed specification
120
(Axis 12) Current speed data
F73C
F63D
(Axis 12) Acceleration/deceleration specification
122
(Cannot be used)
F73D
F63E
(Axis 12) Push-current limiting value
124
(Axis 12) Alarm
F73E
F63F
(Axis12) Control signal
126
(Axis 12) Status signal
F73F
F640
(Axis 13) Position data specification (L)
128
(Axis 13) Current position data (L)
F740
F641
(Axis 13) Position data specification (H)
130
(Axis 13) Current position data (H)
F741
F642
(Axis 13) Positioning band specification (L)
132
(Axis 13) Current electrical current (L)
F742
F643
(Axis 13) Positioning band specification (H)
134
(Axis 13) Current electrical current (H)
F743
F644
(Axis 13) Speed specification
136
(Axis 13) Current speed data
F744
F645
(Axis 13) Acceleration/deceleration specification
138
(Cannot be used.)
F745
F646
(Axis 13) Push-current limiting value
140
(Axis 13) Alarm
F746
F647
(Axis13) Control signal
142
(Axis 13) Status signal
F747
* With the RS485 SIO unit, the initial address is “0xF600H” for PLC ROBONET messages, and “0xF700H” for ROBONET
PLC messages.
-148-