Part 1 specification, 2 basic specifications – IAI America REXT User Manual
Page 214
Part 1 Specification
Chapter 4 Controller Unit
190
Part 1 Specification
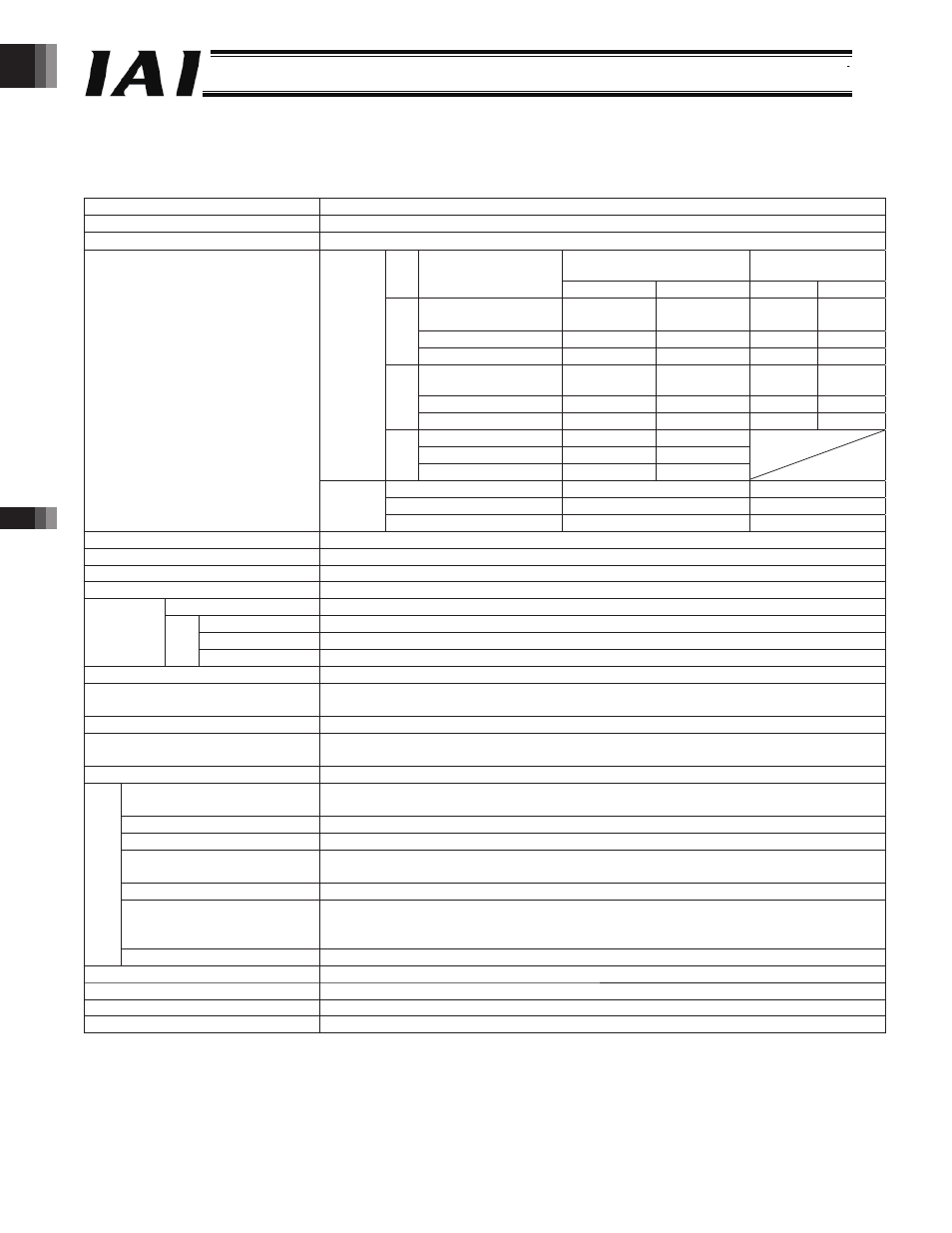
4.2 Basic Specifications
The basic specifications are the same between the RACON and RPCON.
Item
Specification
Number of controllable axes
1 axis
Power-supply voltage
24 VDC r 10%
Standard specification, high
acceleration/deceleration type
Energy-saving type
Actuator
Rating
Max. *1
Rating
Max. *1
SA4ySA5yRA4
(20W) type
1.3 A
4.4 A
1.3 A
2.5 A
SA6yRA4 (30W) type
1.3 A
4.0 A
1.3 A
2.2 A
R
C
A
RA3 (20W) type
1.7 A
5.1 A
1.7 A
3.4 A
SA3 (10W) type
SA5yTA6 (20W) type
1.3 A
4.4 A
1.3 A
2.5 A
SA6yTA7 (30W) type
1.3 A
4.0 A
1.3 A
2.2 A
R
C
A2
RA4
y
TA5
(20W) type
1.7 A
5.1 A
1.7 A
3.4 A
RA1LySA1L
0.8 A
4.6 A
RA2LySA2L
1.0 A
6.4 A
RACON
unit
R
C
L
RA3LySA3L
1.3 A
6.4 A
Actuator
Rating
Max. *2
20P, 28P, 28SP motors
0.4 A
2.0 A
Power-supply current
RPCON
unit
42P, 56P motors
1.2 A
2.0 A
Positioning commands
Position number specification, numerical specification
Number of positioning points
768 points
Serial communication
RS485, 1 channel (dedicated connector)
Communication protocol
Modbus protocol
RCP*, RCA*
800 pulses/rev
RA1LySA1L
715 pulses/rev
RA2LySA2L
855 pulses/rev
Encoder
resolution
R
C
L
RA3LySA3L
1145 pulses/rev
Encoder interface
Incremental specification conforming to EIA RS-422A/423A
Backup memory
Position table data and parameters are saved in the nonvolatile memory.
Serial EEPROM rewrite life: 100,000 times max.
LED indicators
Servo ON indicator, alarm indicator, communication status indicator, status indicator
Forced release of electromagnetic
brake
Brake release switch on the front panel
Emergency stop circuit
Built-in drive-source cutoff relay
Ambient operating
temperature
0 to 50qC (*3)
Ambient operating humidity
95% RH max. (non-condensing)
Operating ambience
Free from corrosive gases
Surrounding storage
temperature
-25 to 70qC
Surrounding storage humidity 95% RH max. (non-condensing)
Vibration resistance
XYZ directions:
10 to 57 Hz, half amplitude – 0.035 mm (continuous) / 0.075 mm (intermittent)
57 to 150 Hz – 4.9 m/s
2
(continuous) / 9.8 m/s
2
(intermittent)
E
nv
iro
nm
en
t
Impact resistance
XYZ directions: 147 mm/s
2
, 11 ms, half-sine wave pulse
Protection degree
IP20
Cooling
Forced air cooling (built-in fan)
Weight
200 g
External dimensions
34 W x 105 H x 73.3 D mm
*1 The current becomes the maximum during the excited-phase detection of the servo motor performed when the servo is
turned on for the first time following the power on. (Normal: Approx. 1 to 2 seconds, Maximum: 10 seconds)
*2 The current becomes the maximum during the excited-phase detection performed when the servo is turned on for the first
time following the power on. (Normal: 100 msec)
*3 The ambient operating temperature of a ROBONET system is 0 to 40qC.
-214-