Part 1 specification, 1) finger operation – IAI America REXT User Manual
Page 244
Part 1 Specification
Chapter 4 Controller Unit
220
Part 1 Specification
4.6 Notes on ROBO Gripper
(1) Finger Operation
[1] Definition of position
The home of each finger is where the finger is open. The position command specifies the travel distance of each
finger from its home position toward the closing side.
Accordingly, the maximum command value is 5 mm for the GRS type and 7 mm for the GRM type.
With the 2-finger type, the specified stroke indicates the sum of travel distances of both fingers.
In other words, the travel distance per finger is one-half the stroke.
[2] Definition of speed and acceleration
Both the speed and acceleration commands apply to one finger.
With the 2-finger type, the relative speed and acceleration are twice the command values.
[3] Gripper operation mode
In applications where the work part is gripped using the ROBO Gripper, be sure to use the actuator in the “push
mode.”
(Note) If the actuator is used in the “positioning mode,” a servo error may generate while the work part is gripped.
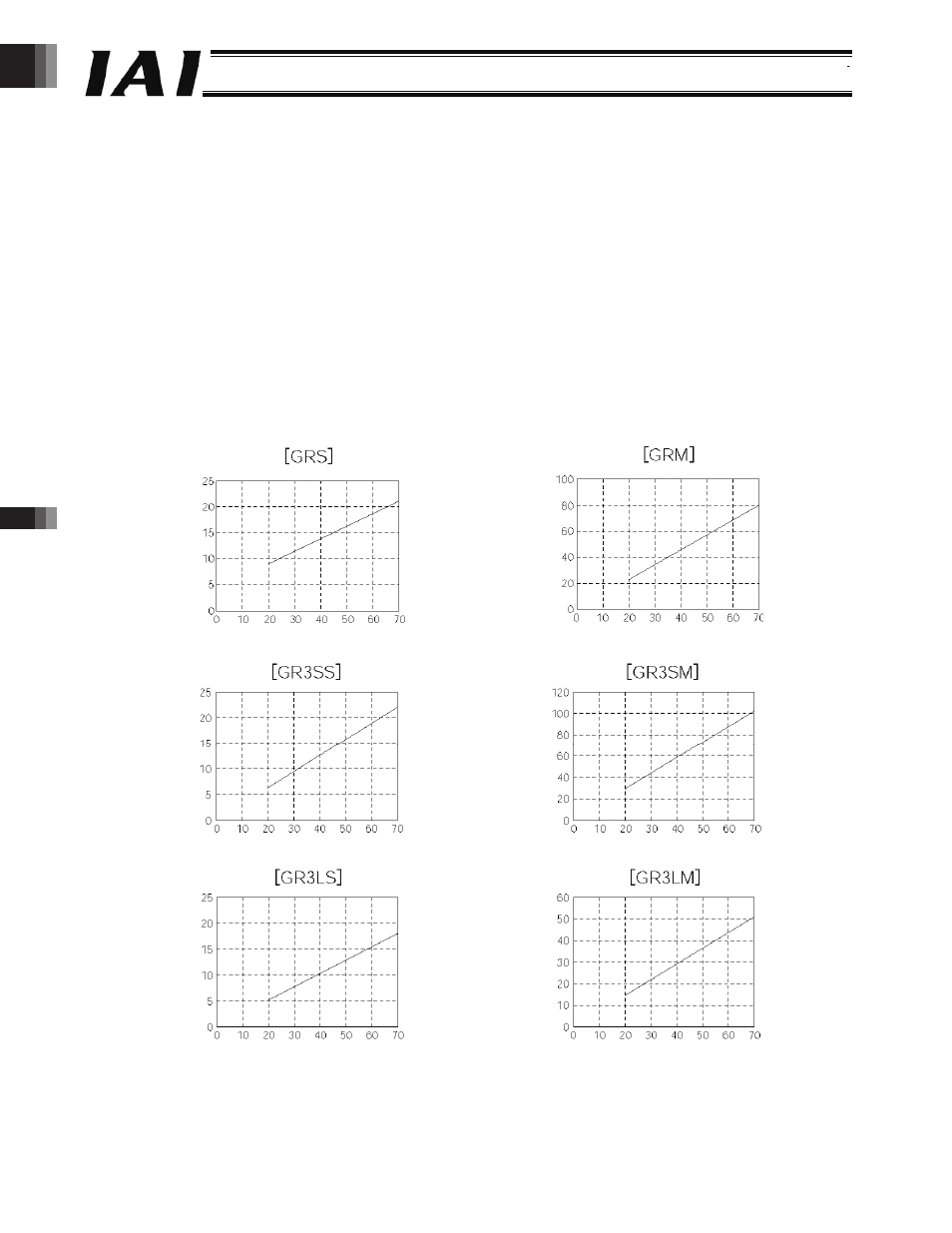
[Diagram of gripping force and current-limiting value]
Gr
ipping
for
ce
(N
)
Gripping
for
ce
P
(N
)
Gripping
for
ce
P
(N
)
Gr
ipping
for
ce
(N
)
Gripping
for
ce
P
(N
)
Gripping
for
ce
P
(N
)
Current-limiting value (%)
Current-limiting value (%)
Current-limiting value (%)
Current-limiting value (%)
Current-limiting value (%)
Current-limiting value (%)
-244-