3 gen, 4 24-v, Neral spec – IAI America REXT User Manual
Page 33: V power c, Ifications, Current con, Nsumption, N of each u, Unit, Part 1 specification
2
T
2
G
S
*
*
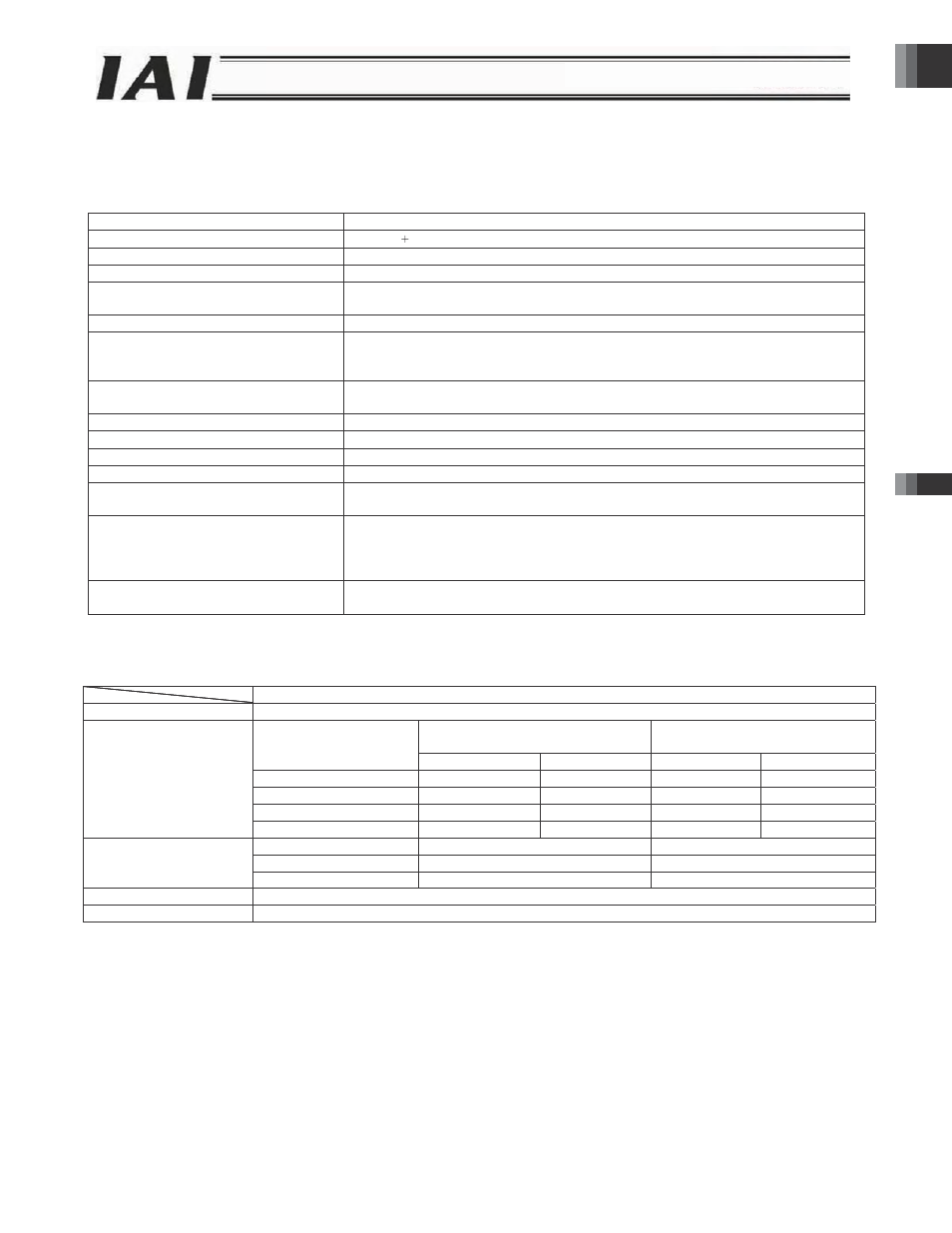
2.3 Gen
The general sp
Power-supply
Power-supply
Maximum num
Supported fiel
ROBONET co
Component un
Emergency st
Use environm
Surrounding a
Surrounding h
Protection deg
External dime
Interconnectio
Installation me
2.4 24-V
Gateway R uni
RACON unit
RPCON unit
Simple absolut
ROBONET ext
*1 The curre
turned on fo
*2 The curre
time followi
neral Spec
pecifications of
Item
voltage
current
mber of connec
d networks
ommunication p
nits
op/enable ope
ent
air temperature
humidity
gree
nsions of each
on of units
ethod
V Power C
it
60
A
S
S
S
R
A
20
42
te R unit
30
tension
10
nt becomes the
or the first time
nt becomes the
ing the power o
ifications
f a ROBONET
24
V
ctable axes
1
C
(s
protocol
M
G
R
(R
ration
T
u
P
e
0
9
IP
h unit
34
A
P
U
co
ex
In
(H
Current Con
00 mA max. (C
Actuator
A3 (10)
A4 SA5 RA4
A6 RA4 (30)
RA3 (20S)
Actuator
0P, 28P, 28SP
2P, 56P motors
00 mA max.
00 mA max.
e maximum du
e following the
e maximum du
on. (Normal: 10
system are list
4 VDC 10
Varies dependin
6 axes (Contro
CC-Link, Device
slave station)
Modbus protoco
Gateway R unit
ROBONET exte
Refer to 2.2 for
The entire syste
nit. Each contr
Pollution degree
to 40 C
5% RH max. (n
P20
4 W x 105 H x
All units have th
Power-supply co
Unit link cable o
onnection circu
xtension unit is
nstallation on a
However, contr
nsumption
Common to all f
a
4 (20)
P motors
s
uring the excite
power on. (Nor
uring the excite
00 msec)
ed below.
%
ng on the syste
oller units can b
eNet, Profibus,
ol
, controller unit
ension
r details.)
em is stopped b
roller unit has a
e 2
non-condensin
73.3 D [mm]
he same dimen
onnection plate
or controller con
uit board, simp
s used (multi-st
a DIN rail (35 m
rollers correspo
n of Each U
Curre
four types)
Standard spec
acceleration/de
Rating
1.3 A
1.3 A
1.3 A
1.7 A
Rat
0.4
1.2
d-phase detect
rmal: Approx. 1
d-phase detect
Specificat
em configuratio
be combined fr
EtherNet/IP, R
t, simple absolu
by the emergen
a built-in drive-s
ng)
nsions.
e
nnection cable
le absolute con
tage layout or
mm)
onding to exter
Unit
ent consumptio
cification, high
eceleration type
Max. *1
4.0 A
4.4 A
4.0 A
5.1 A
ting
4 A
2 A
tion of the serv
1 to 2 seconds
tion performed
tion
on.
reely.)
RS485 SIO
ute R unit
ncy stop input f
source cutoff re
when the ROB
nnection circuit
external SIO lin
rnal SIO link ax
n
e
E
Ratin
1.3
1.3
1.3
1.7
vo motor perfor
, Maximum: 10
d when the serv
from the Gatew
elay.
BONET commu
t board or ROB
nk)
xes are exclude
Energy-saving t
ng
M
A
A
A
A
Max. *2
2.0 A
2.0 A
rmed when the
0 seconds)
vo is turned on
way R
unication
BONET
ed.)
ype
Max. *1
2.2 A
2.5 A
2.2 A
3.4 A
e servo is
for the first
Part 1 Specification
Chap
ter 2 Sy
ste
m
Co
nfig
uration an
d Gener
a
l Specification
s
Part 1 Specification
-33-