Part 1 specification, Caution – IAI America REXT User Manual
Page 107
Part 1 Specification
Chapter 3 Gateway R unit
85
Part 1 Specification
(7) Positioning Start (CSTR) PLC Output Signal
Upon detection of the “0” (OFF) o “1” (ON) leading edge of this signal, the controller will read the target position number
consisting of a 10-bit binary code from PC1 to PC512, and perform positioning to the target position specified by the
corresponding position data. The same procedure is followed when the target position is specified directly as a numerical
value in the position data specification area.
Before executing a start command, the operation data such as target position and speed must be set in the position table
using a PC/teaching pendant.
If this command is issued when no home return has been performed after the power ON (= when the HEND output signal
is “0” (OFF)), home return will be performed automatically and then the positioning will be executed.
Turn this signal “0” (OFF) after confirming that the PEND signal has turned “0” (OFF).
(8) Moving (MOVE)
This signal is “1” (ON) while the actuator is moving with the servo turned ON (and also during home return, push
operation and jogging operation).
Use the MOVE signal together with the PEND signal for status judgment on the PLC side.
This signal will turn “0” (OFF) once the actuator completes positioning, home return or push operation, or is paused.
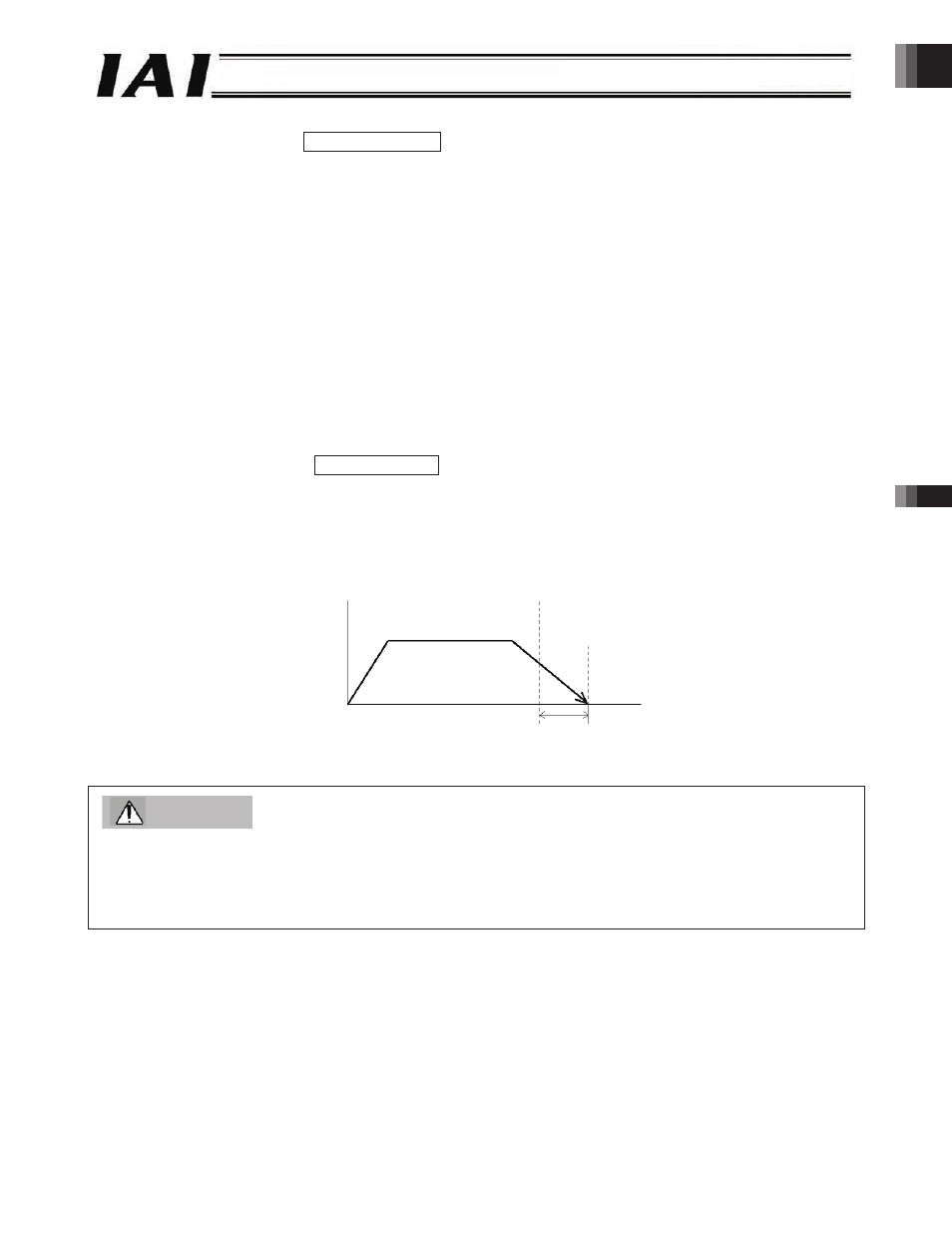
(9) Position complete (PEND) PLC Input Signal
This signal turns “1” (ON) when the actuator has moved to the target position and entered the positioning band, or push
operation has completed (the work part has not been missed).
When the servo status changes from OFF to ON, the applicable position is set as the target position and accordingly this
signal turns “1” (ON). When positioning operation is subsequently started via the HOME signal or CSTR signal, this
signal will turn “0” (OFF).
Caution
If the servo turns OFF or an emergency stop is actuated while the actuator is stopped at the target position, the PEND will
turn “0” (OFF).
If the current position is within the positioning band when the servo turns ON again, the signal will return to “1” (ON). If the
CSTR remains “1” (ON), the PEND will not turn “1” (ON) even when the current position is within the positioning band. It will
turn “1” (ON) only after the CSTR signal has turned “0” (OFF).
The position complete
signal turns ON.
Speed
Target position
Travel distance
Positioning band
Time
-107-