Important – Yaskawa MP920 Motion Module User Manual
Page 97
2.4 Position Control Using Motion Commands
2-71
2
5. Set interpolation (INTERPOLATE = 4) in the motion command code (OW20).
When interpolation (INTERPOLATE) is set as the motion command, the axis performs
positioning to the position specified in the position reference (OL12).
6. Stop refreshing the position reference (OL12).
7. Change the motion command to 0.
When the axis enters the Positioning Completed Range (OW0E) after Distribution
Completed (bit 2 of IW15 is ON), the POSCOMP Positioning Completed Signal
(bit 13 of IW00) turns ON.
When END_OF_INTERPOLATE is set in the motion command, the motion command will be auto-
matically changed to 0 by the system by the next scanning.
The interpolation commands do not have a parameter that sets the speed reference. The position refer-
ence will be changed each scan by the interpolation speed.
YES
YES
YES
NO
NO
NO
YES
NO
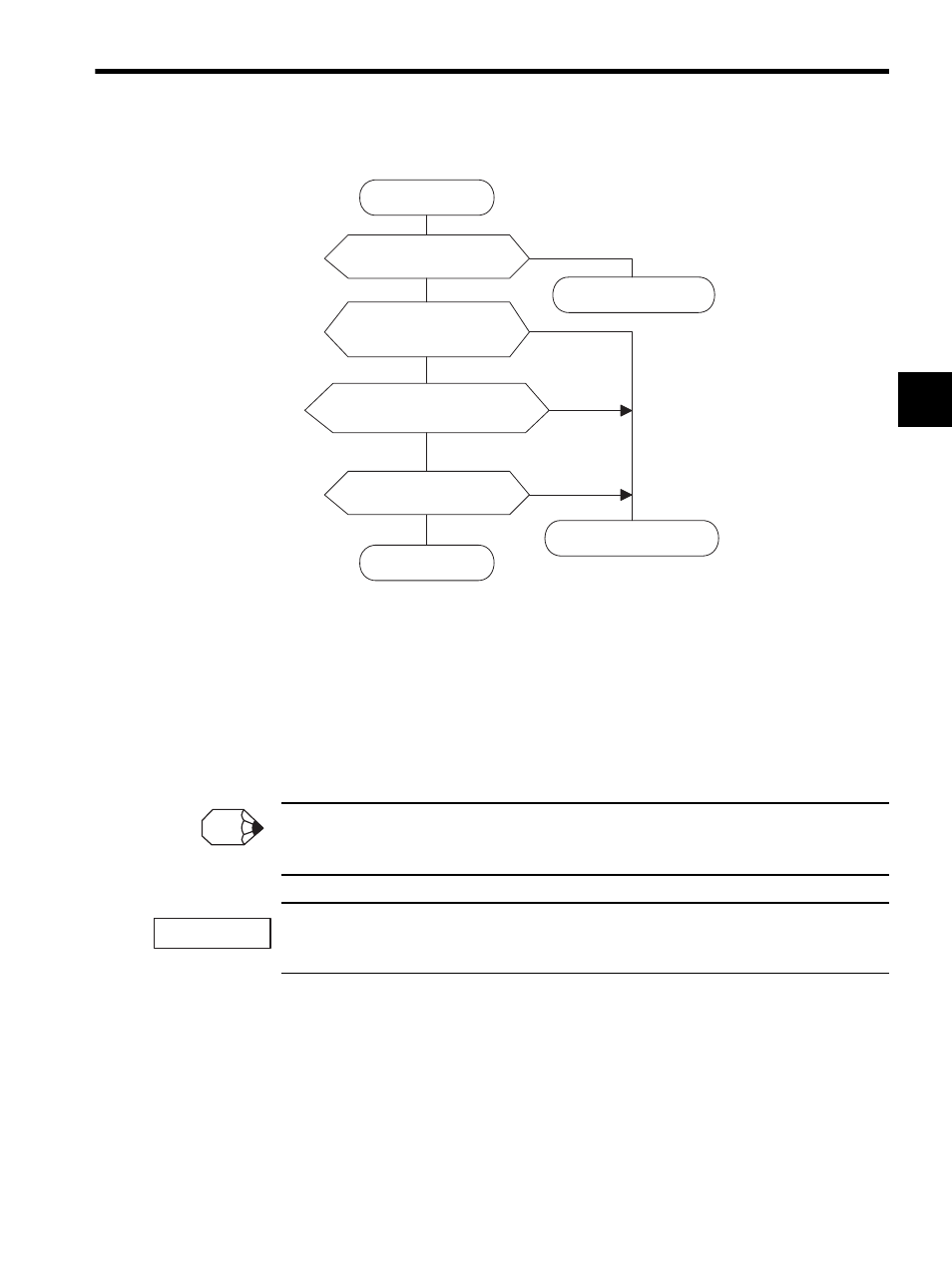
INTERPOLATE
Start condition check
Retuen (NG)
Retuen (NG)
Control mode =
position control mode?
Motion command status
BUSY = OFF?
Return
(INTERPOLATE executable)
Motion command code
= NOP||INTERPOLATE||
ENDOF_INTERPOLATE?
Motion command response
= NOP||INTERPOLATE||
ENDOF_INTERPOLATE?
INFO
IMPORTANT