Yaskawa MP920 Motion Module User Manual
Page 196
5 SVA Module Specifications and Handling
5.4.1 Motion Fixed Parameters
5-54
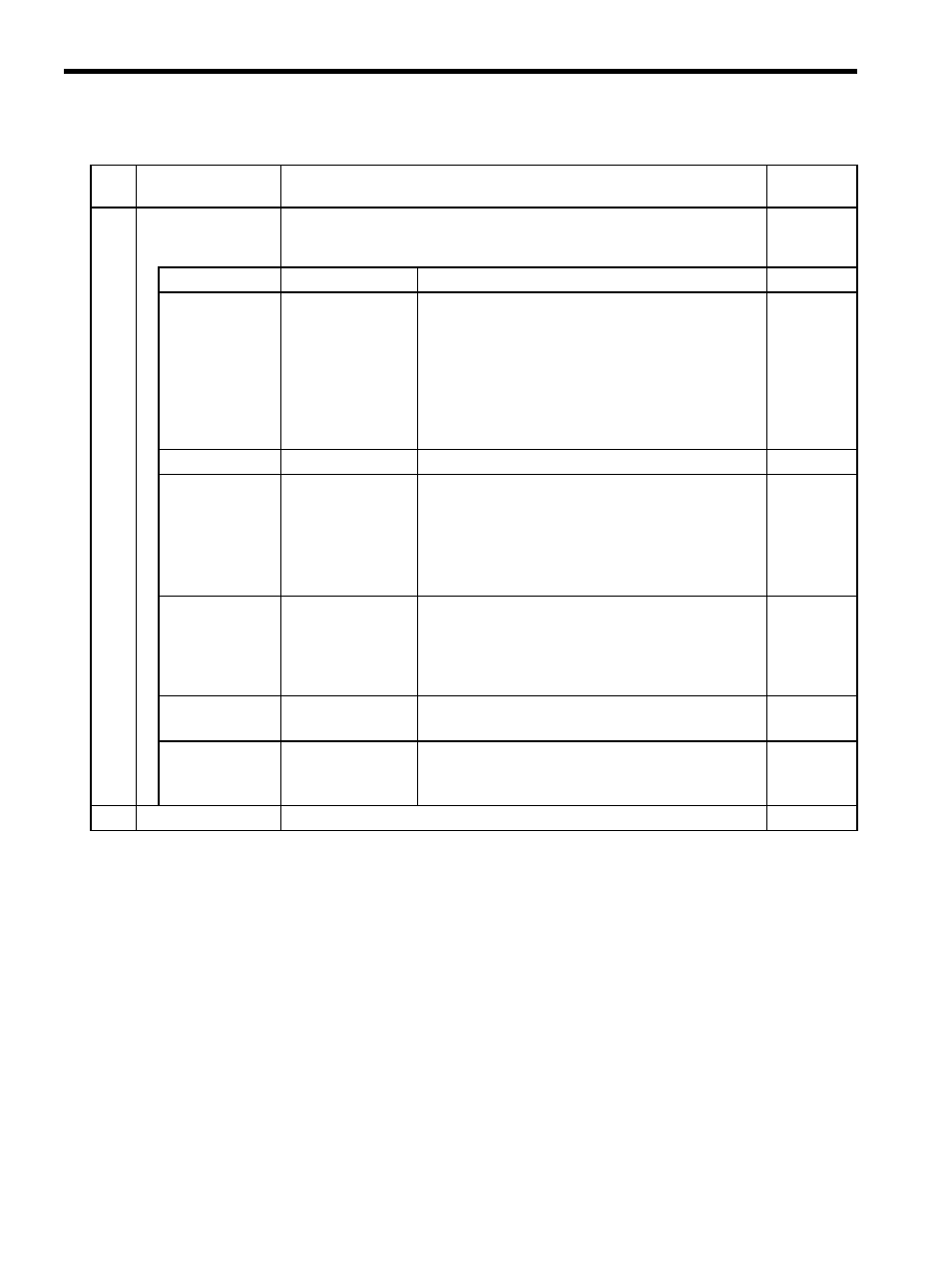
14
Additional Function
Selections
(AFUNCSEL)
Set additional functions, such as the signal type used and signal functions.
−
Bits 0 to 1
Not used.
−
−
Bit 2
Limit Switch Signal
Selection
(LIMITSEL)
Set whether to use OB0IF or DI signal DI05 as the
limit switch signal when returning to the zero point.
0: Use OB01F.
1: Use the DI signal (DI05 deceleration limit signal).
When using OB01F, the external signal (DI signal
input by the LIO-01 or other Module) in the user program
must be connected (i.e., programmed) to OB01F.
Note: Valid only for SVA-01A (4-axis) Module.
0
Bits 3 to 5
Not used.
−
−
Bit 6
Absolute Position
Read at Startup
(ABSRDSEL)
Set whether or not to read absolute position data from the
absolute encoder when MP920 power is turned ON.
0: Read.
1: Not read.
Note: Valid only when the fixed parameter: Encoder
selection is selected for the absolute encoder.
0
(Read)
Bit 7
Motion Command
Code Selection
(MCMDSEL)
Set whether or not to use an OW20: Motion Com-
mand Code when bit 2 of OW00: Position Control
Mode is selected.
0: Not used.
1: Used.
1
(Used)
Bit 9
Σ-II Series SERVO-
PACK Selection
Set to 1 (ON) when using
Σ-II series SERVOPACKs.
0: OFF, 1: ON
0
(OFF)
Bits 12 to 15
Error Count Alarm
Detection Setting
Coefficient
An error is detected when P Error Counter Over
(IW001) = Error Count Alarm Detection Setting
(OW0F)
×
2
n
(n = 0 to 15)
0
15
Not used.
−
−
Table 5.5 Motion Fixed Parameters (cont’d)
No.
Name
Description
Factory
Setting