Yaskawa MP920 Motion Module User Manual
Page 206
5 SVA Module Specifications and Handling
5.4.2 Motion Setting Parameters
5-64
* These bits can be used in various applications because they are general-
purpose DOs. Refer to Supplemental Explanation 2 for the application
examples where these bits are used as the outputs to the servo driver.
1
RUN Mode
Settings
(RUNMOD)
(cont’d)
Bit 7
(cont’d)
Phase Reference
Disable
(PHREFOFF)
The electronic cam control loop cuts off the integration circuit for the
standard speed reference and provides a position reference based on
the phase compensation setting.
Bit 8
Motion Com-
mand Mode
Enable/Disable
(MCDSEL)
Set whether an OW20: Motion Command Code is
used or not.
0: OFF (Disable)
1: ON (Enable)
Valid when use (= 1) is set for the Motion Command
Selection (bit 7 of fixed parameter number 14).
1
Bit 9
Zero Point
Return Direc-
tion Selection
(ZRNDIR)
Set the direction for returning to the zero point.
0: OFF
Reverse direction
(position pulse in the deceleration direction)
1: ON
Forward direction
(position pulse in the acceleration direction)
0
Bit 10
Absolute
Position Read
Request
(ABSRD)
The absolute position data will be read from the absolute
encoder when this bit turns ON. The bit 10 of IW00:
Absolute Position Read Completed Signal will turn ON
when the data has been read. This parameter is used if the
servo driver is turned OFF while the MP920 is ON.
0
Bit 11
Feed Forward
Gain at Switch-
ing Control
Mode
−
0
Bit 12
Not used.
Set to “0.”
0
Bit 13
DI Latch
Request
(DINTREQ)
The current position the instant the DI latch signal turns
ON is indicated in IL06: Machine Coordinate System
Latch Position when this bit is ON. bit 11 of IW00:
DI Latch Completed Signal will turn ON when DI latch
has been completed.
0
Bit 14
Not used.
−
0
Bit 15
Phase Control
Integration Reset
(IRESET)
The PI control integration is reset if this bit turns ON in
Phase Control Mode.
0
2
RUN Com-
mand Settings
(SVRUNCMD)
OW01
Set the output signal from Motion Module to the driver as well as the RUN mode required
for motion control. The bit configuration is described below.
Bit 0
RUN Servo ON
(DO0)
Used as the servo ON signal for the driver. “1” is output
from DO0 if this bit is set to “1” when SVCRDY
(IB007) is ON.
0
Bit 1
DO1
Used as a general-purpose DO.
*1
0
Bit 2
DO2
Used as a general-purpose DO.
*1
0
Bit 3
DO3
Used as a general-purpose DO.
*1
0
Bit 4
ROC
0
DO4
Used as a general-purpose DO.
*1
0
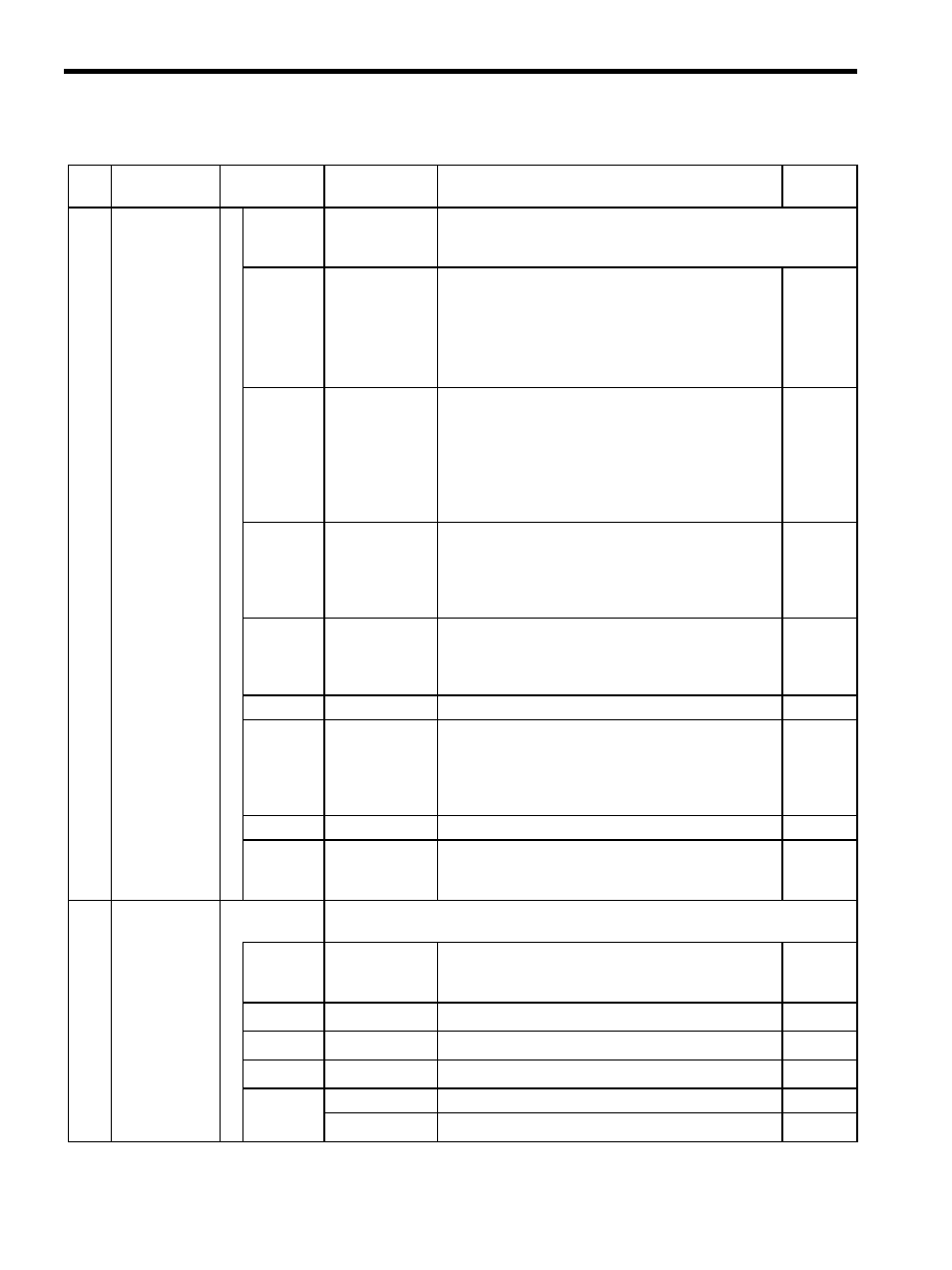
Table 5.6 Motion Setting Parameters (cont’d)
No.
Name
Register Num-
ber
Setting Range/
Bit Name
Description
Factory
Setting