Phase-c pulse, Dec1 + zero signal, Dec2 + zero signal method – Yaskawa MP920 Motion Module User Manual
Page 89
2.4 Position Control Using Motion Commands
2-63
2
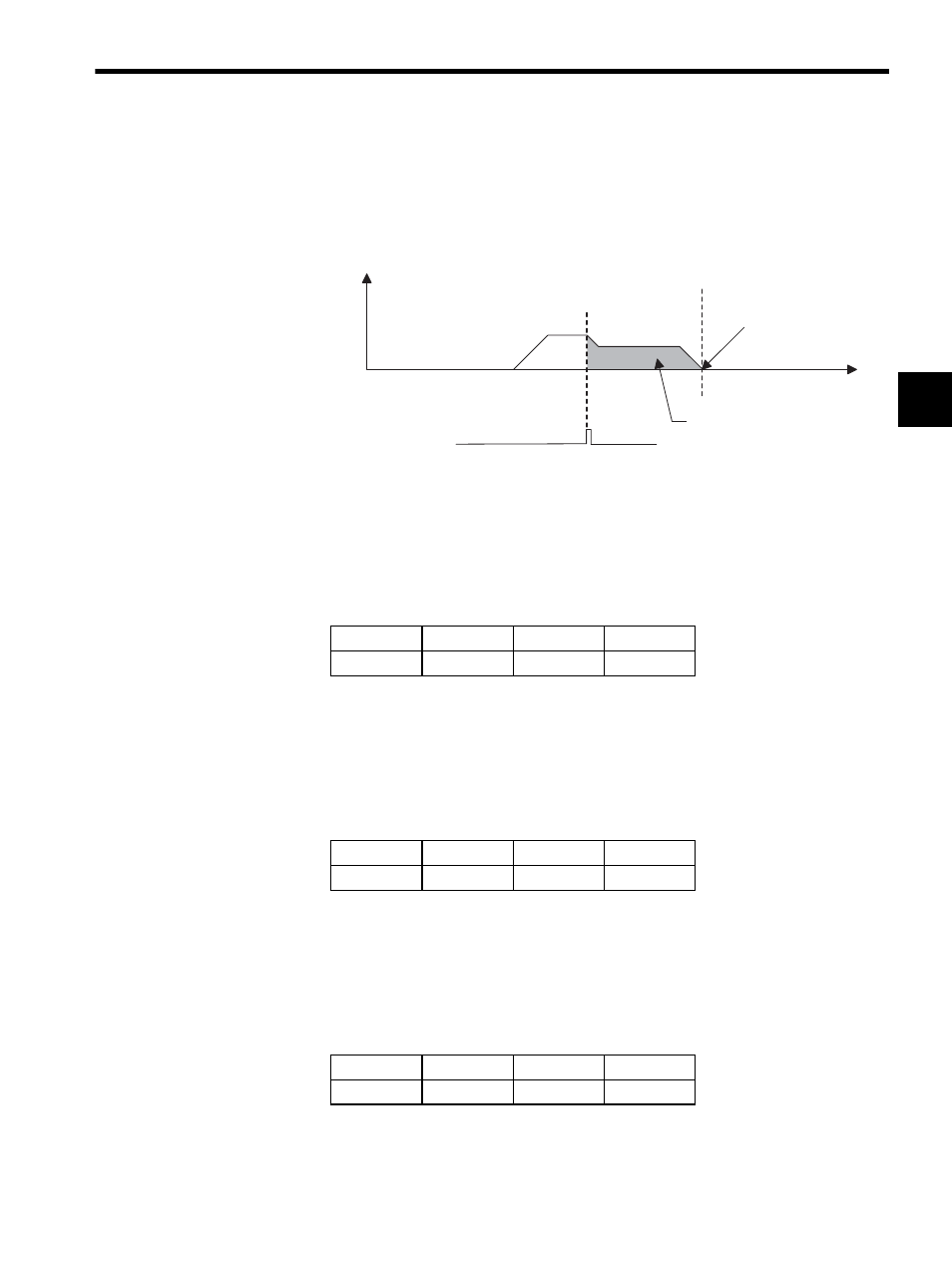
Phase-C Pulse
This method is used to perform zero point return using only a zero point signal (Phase-C
pulse) by rapid traverse using linear acceleration/deceleration.
1. The axis travels at approach speed in the direction specified in the motion setting servo
parameter (OB009).
2. The axis decelerates to creep speed after detecting the initial zero point signal.
3. The axis stops after traveling only the zero point return final travel distance from the ini-
tial zero point signal, and that position will be the machine coordinate system zero point.
DEC1 + ZERO Signal
Zero point return is performed using a ZERO signal (DI signal) in place of the Phase-C
pulse used in the DEC1 + Phase-C Pulse described above.
For details, see DEC1 + Phase-C Pulse.
DEC2 + ZERO Signal Method
Zero point return is performed using a ZERO signal (DI signal) in place of the Phase-C
pulse used in the DEC2 + Phase-C Pulse discussed above.
For details, see DEC2 + Phase-C Pulse.
SVA-01A
SVA-02A
SVB-01
PO-01
Available
Available
Available
Not available
SVA-01A
SVA-02A
SVB-01
PO-01
Available
Not available Available
Available
SVA-01A
SVA-02A
SVB-01
PO-01
Available
Not available Not available Available
0
1.
2.
3.
Speed
reference
Zero point signal
(Phase-C pulse)
Creep speed
Approach speed
Zero point
Zero point
return position
Time
Zero point return
final travel distance
Reverse direction
← → Forward direction