Yaskawa MP920 Motion Module User Manual
Page 226
5 SVA Module Specifications and Handling
5.4.3 Motion Monitoring Parameters
5-84
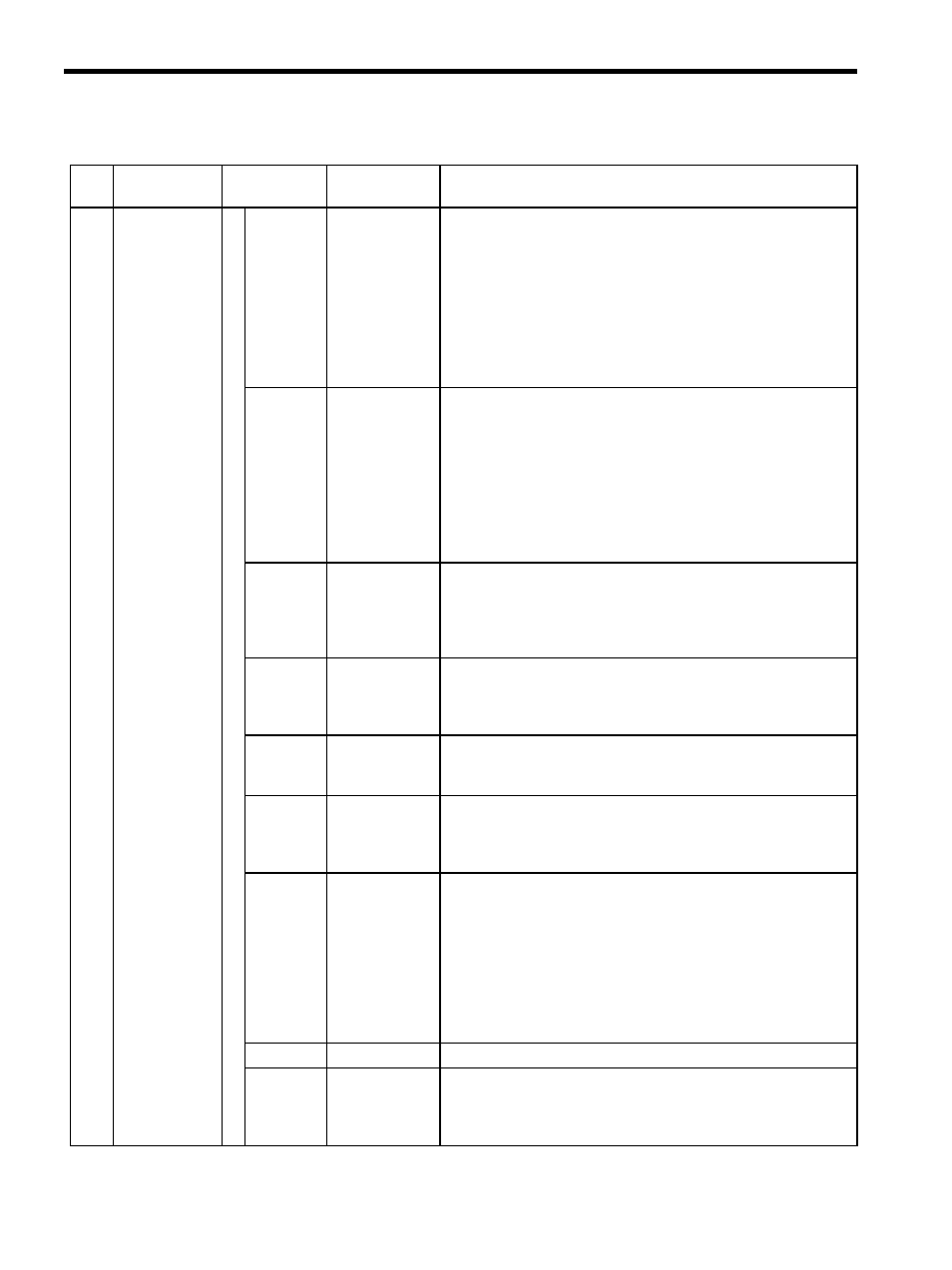
1
RUN Status
(RUNSTS)
(ccont’d)
Bit 7
Motion Control-
ler RUN Ready
(SVCRDY)
Turns ON when RUN preparations for the Motion Module have been
completed. The following may be reason why RUN preparations are
not completed.
• Major damage has occurred.
• Axis that is not used was selected (motion fixed parameter setting).
• Motion fixed parameter setting error.
• Cumulative no. of rotations received error.
• Motion fixed parameters are being changed.
• Absolute position is being read from the absolute encoder.
Bit 8
Motion Control-
ler RUN
(SVCRUN)
Turns ON under the following conditions.
• IB07: RUN Ready turns ON.
• Any of OB000 to OB004: Control Mode Flags turns ON.
• OB01: Servo ON turns ON.
If an alarm is generated even though this bit is ON in Position Control
Mode when an OW20: Motion Command Code is used, the axis
will not move even if a motion command is issued.
Clear the alarm, set the motion command to “NOP” for 1 scan or
more, and then set the motion command again.
Bit 9
Rotation Direc-
tion when Using
Absolute
Encoder
(DIRINV)
Monitors the rotation direction selected for motion fixed parameters.
Rotation direction when using an absolute encoder
0: Forward
1: Reverse
Bit 10
Absolute Posi-
tion Read Com-
pleted Signal
(ABSRDC)
Turns ON when bit 10 of OW00: Absolute Position Read Request
turns ON and absolute position data from the absolute encoder is read.
If an error occurs, bit 4 of IW00: Cumulative Number of Rota-
tions Received error will turn ON.
Bit 11
DI Latch Com-
pleted Signal
(DIINT)
Turns ON when bit 13 of OW00: DI Latch Request turns ON and
the DI latch signal is input. The current position at this time will be
indicated at IL06: Latch Position in Coordinate System.
Bit 12
Feedback Pulse
0 (FBP0)
Indicates that there is no feedback pulse and is normally ON if the
Servomotor is not operating.
If this bit remains ON even though a reference is output, the feedback
signal line from PG is very likely broken.
Bit 13
Positioning
Completed
Signal
(POSCOMP)
Turns ON when positioning is completed in Position Control Mode.
• Motion Commands Not Used
This bit turns ON when |IL08: Current Position
− OL12:
Position Reference|
≤ OW0E: Positioning Completed Range.
• Motion Command Used
This bit turns ON when bit 2 of IW15: Distribution Completed
turns ON and when |IL08: Current Position
− OL18: Refer-
ence Position in Machine System|
≤ OW0E: Positioning Com-
pleted Range.
Bit 14
Not used.
−
Bit 15
Zero Point
Return Com-
pleted Signal
(ZRNC)
Turns ON when a return to zero point is completed in Zero Point
Return Mode as follows: |IL08: Current Position
− Zero Point
Position|
≤ OW0E: Positioning Completed Range
Table 5.7 Motion Monitoring Parameters (cont’d)
No.
Name
Register
Number
Setting Range/
Bit Name
Description