Yaskawa MP920 Motion Module User Manual
Page 234
5 SVA Module Specifications and Handling
5.4.3 Motion Monitoring Parameters
5-92
37
Servo Driver
Alarm Code
(SVALARM)
IW24
-32768 to 32767
Indicates the error code when IB004: Cumulative Number of
Rotations Received Error turns ON when an absolute position is read
from the absolute encoder.
It is valid when an absolute encoder is used.
38
Not used.
IW25
−
−
39
Speed Refer-
ence Output
Monitor
(RVMON)
IL26
-2
31
to 2
31
-1
Indicates the travel distance every scan and is “0” when IB170:
Machine Locked is ON.
It is valid in Position Control Mode when an OW20: Motion
Command Code is used.
41
Position Buffer
Read Data
(CNMON)
IL28
-2
31
to 2
31
-1
Position data from the position buffer specified at OL38: Position
Buffer Access Number is read and stored at this parameter when
motion setting parameter OB21F: Position Buffer Read turns ON.
It takes about 2 scans from the time that OB21F: Position Buffer
Read turns ON until data is stored at this register.
It is valid in Position Control Mode when an OW20: Motion
Command Code is used.
43
Not used.
IL2A
−
−
45
Integral Out-
put Monitor
(YIMON)
IL2C
-2
31
to 2
31
-1
Indicates the integral output value when position loop is used with PI
control (Refer to bit 8 of OW21).
It is valid in Position Control Mode or Zero Point Return Mode.
47
Calculated
Reference Co-
ordinate Sys-
tem Position
(POS)
IL2E
-2
31
to 2
31
-1
This parameter has meaning when the motion fixed parameter: Axis
Selection (bit 5 of the Motion Controller Function Selection Flags) is
set to an infinite length axis (= 1). It indicates the target position for
every infinite length axis scan. Refer to Position Monitoring in 2.3.1
Prerequisites for Position Control for details.
It is valid in Position Control Mode when an OW20: Motion
Command Code is used.
49
Primary Lag
Monitor
(LAGMON)
IL30
-2
31
to 2
31
-1
Indicates (PI output
− Primary lag output).
It is valid in Position Control Mode or Zero Point Return Mode.
51
Position Loop
Output Monitor
(PIMON)
IL32
-2
31
to 2
31
-1
Indicates the position loop output value (prior to adding the calculated
feed forward value).
It is valid in Position Control Mode or Zero Point Return Mode.
53
Position Moni-
tor 2 (APOS2)
IL34
-2
31
to 2
31
-1
This parameter is valid when bit 7 (motion command code selection)
of fixed parameter No. 14 is set to 1 (“Used”). It indicates the value
before addition of OL06: Zero Point Offset. When using this
parameter, add the zero point offset converted to the current unit (ref-
erence units or pulses).
The setting of OB2D, bit 3: Position Monitor 2 Unit Selection
affects the data stored for this parameter.
• OB2D, bit 3 = 0
Indicates the current monitored position in reference units. This
parameter cannot be used if bit 5 (axis selection) of fixed parameter
No. 17 is set to 1 (infinite length axis) and OL02: Zero Point
Offset is not set to 0.
• OB2D, bit 3 = 1
Indicates IL08: Position Monitor converted to pulses.
55
Not used.
IW36
−
−
56
Not used.
IW37
−
−
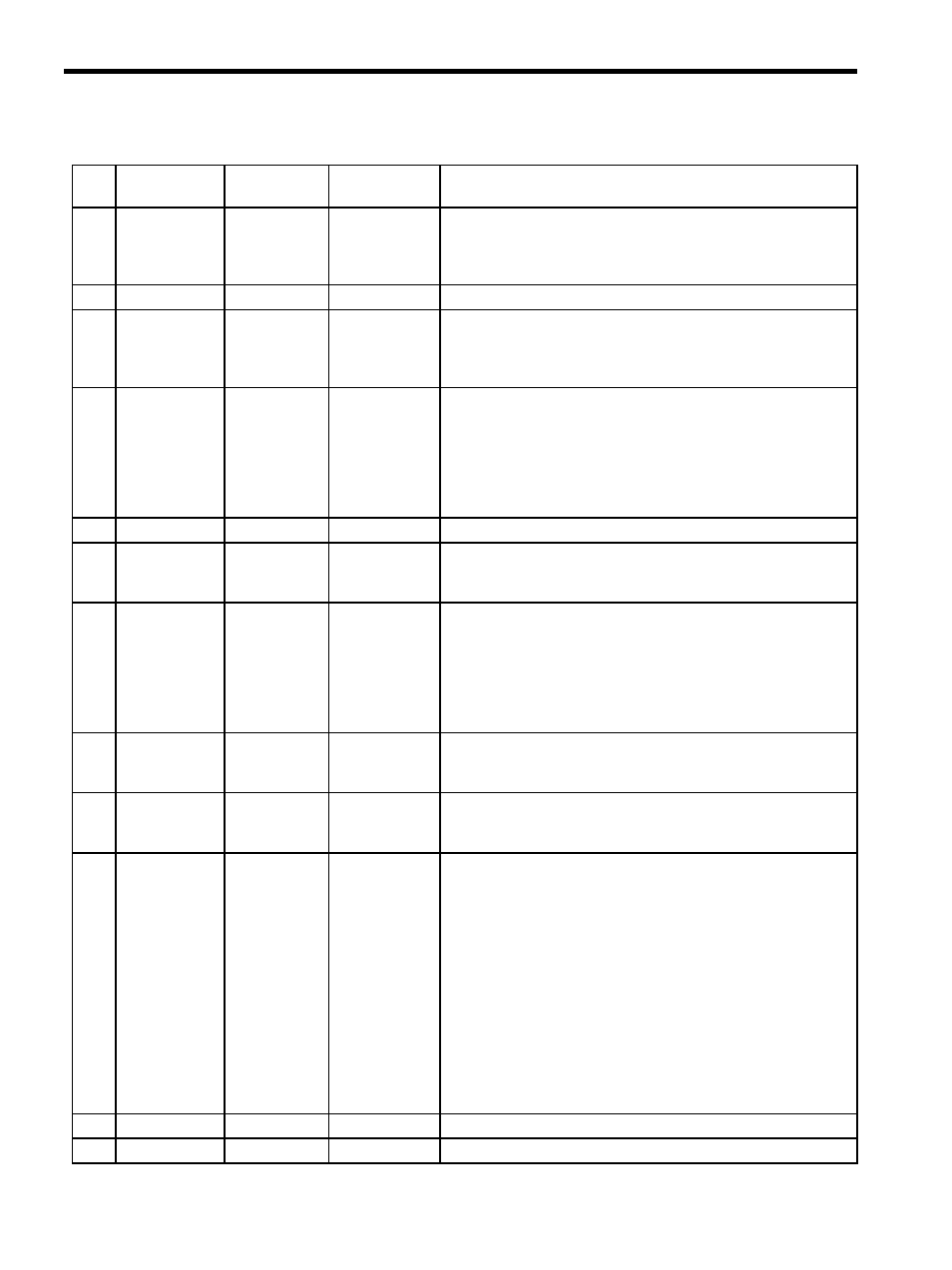
Table 5.7 Motion Monitoring Parameters (cont’d)
No.
Name
Register
Number
Setting Range/
Bit Name
Description