3 differences in external i/o signals – Yaskawa MP920 Motion Module User Manual
Page 188
5 SVA Module Specifications and Handling
5.3.3 Differences in External I/O Signals
5-46
5.3.3
Differences in External I/O Signals
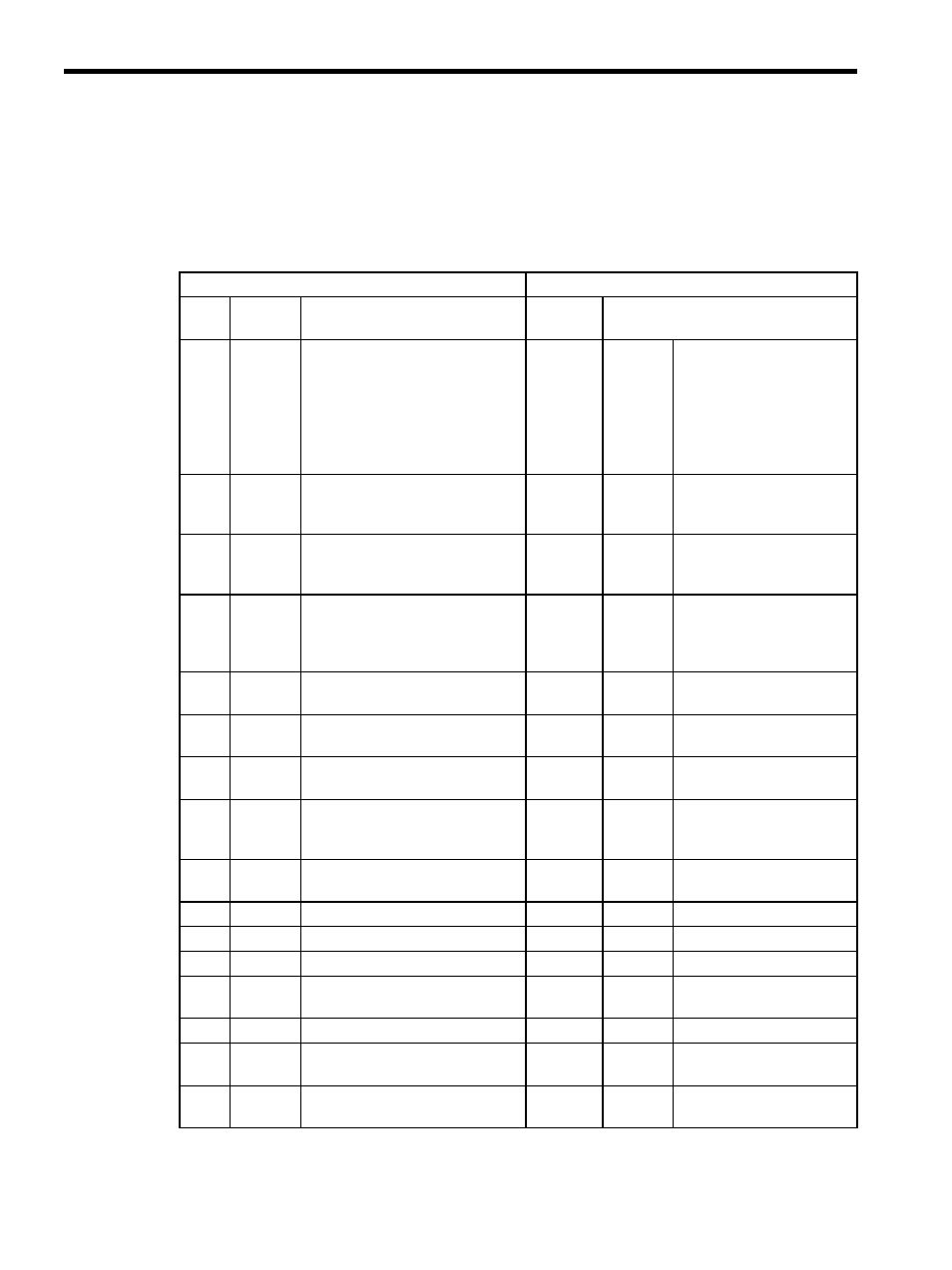
Each signal of the CN5 connector on the SVA-01A Module has been allocated to different
connectors on the SVA-02A Module as shown in the following table. Note these differences
during connection.
SVA-01A Module CN5 Connectors
SVA-02A Module Connectors
Pin
No.
Signal
Name
Remarks
Changed
to:
Remarks
1
26
BAT
0BAT
Absolute encoder battery input ter-
minal (+)
Absolute encoder battery input ter-
minal (-)
These signals are output to the servo
via the servo interface connectors of
each axis.
−
Removed Connect the absolute encoder
battery input terminals to the
SERVOPACK.
28
OTF IN
Axis-1 overtravel (+) inputs
Servo
connector
14
General-purpose input (OTF-
IN)
DI-3
4
OTR IN
Axis-1 overtravel (-) inputs
Servo
connector
33
General-purpose input (OTR-
IN)
DI-4
29
DEC
Axis-1 deceleration limit inputs
LIO/DI
−
Connect this input terminal to
the DI or LIO Module, and
set it in OB01F using a
ladder logic program.
5
ZERO
Axis-1 zero point latch inputs
−
Removed No ZERO signals are used
with the SVA-02A Module.
30
EXT
Axis-1 external positioning latch
inputs
Servo
connector
36
General-purpose inputs (EXT
latch) DI-5
6
RI
Spare axis-1 inputs
LIO/DI
−
Use a LIO or DI Module
instead.
7
BRK
OUT1
Axis-1 brake control outputs
−
−
Output this signal directly
from the SERVOPACK to the
brake.
32
RO1
Spare axis-1 outputs
LIO/DO
−
Use a LIO or DI Module
instead.
−
−
−
−
−
−
23
RIC
Spare common inputs
−
Removed
−
48
ROC
Spare common outputs
−
Removed
−
24
+24 V
24-V power supply for servo
CN3
1
2
A 24-V input connector has
been added.
49
+24 V
24-V power supply for servo
−
−
−
25
0 V
(24 V)
0-V power supply for servo
−
−
−
50
0 V
(24 V)
0-V power supply for servo
−
−
−