Yaskawa MP920 Motion Module User Manual
Page 212
5 SVA Module Specifications and Handling
5.4.2 Motion Setting Parameters
5-70
Table 5.6 Motion Setting Parameters (cont’d)
No.
Name
Register
Number
Setting Range/
Bit Name
Description
Factory
Setting
11
Approach
Speed Setting
(Napr)
OW0A
0 to 32767
Set the approach and creep speed when returning to the
zero point ((ZRET).
The setting unit depends on OB01D: Speed Refer-
ence Selection.
1. When OB01D = 0 (specified in reference units)
1 = 10
n
reference units/min (n = number of digits
below the decimal point)
Pulse unit: 1 = 1000 pulses/min
mm unit: 1 = 1 mm/min
deg unit: 1 = 1 deg/min
Inch unit: 1 = 1 inch/min
2. When OB01D = 1 (specified in reference units)
When OB01D = 1 (% specified), then 1 = 0.01%
(percentage of the rated rotation speed).
Note: A percentage is specified regardless of the set-
ting at OB1D in Zero Point Return Mode.
0
12
Creep Speed
Setting (Nclp)
OW0B
0 to 32767
0
13
Linear Acceler-
ation Time
Constant
(NACC)
OW0C
0 to 32767
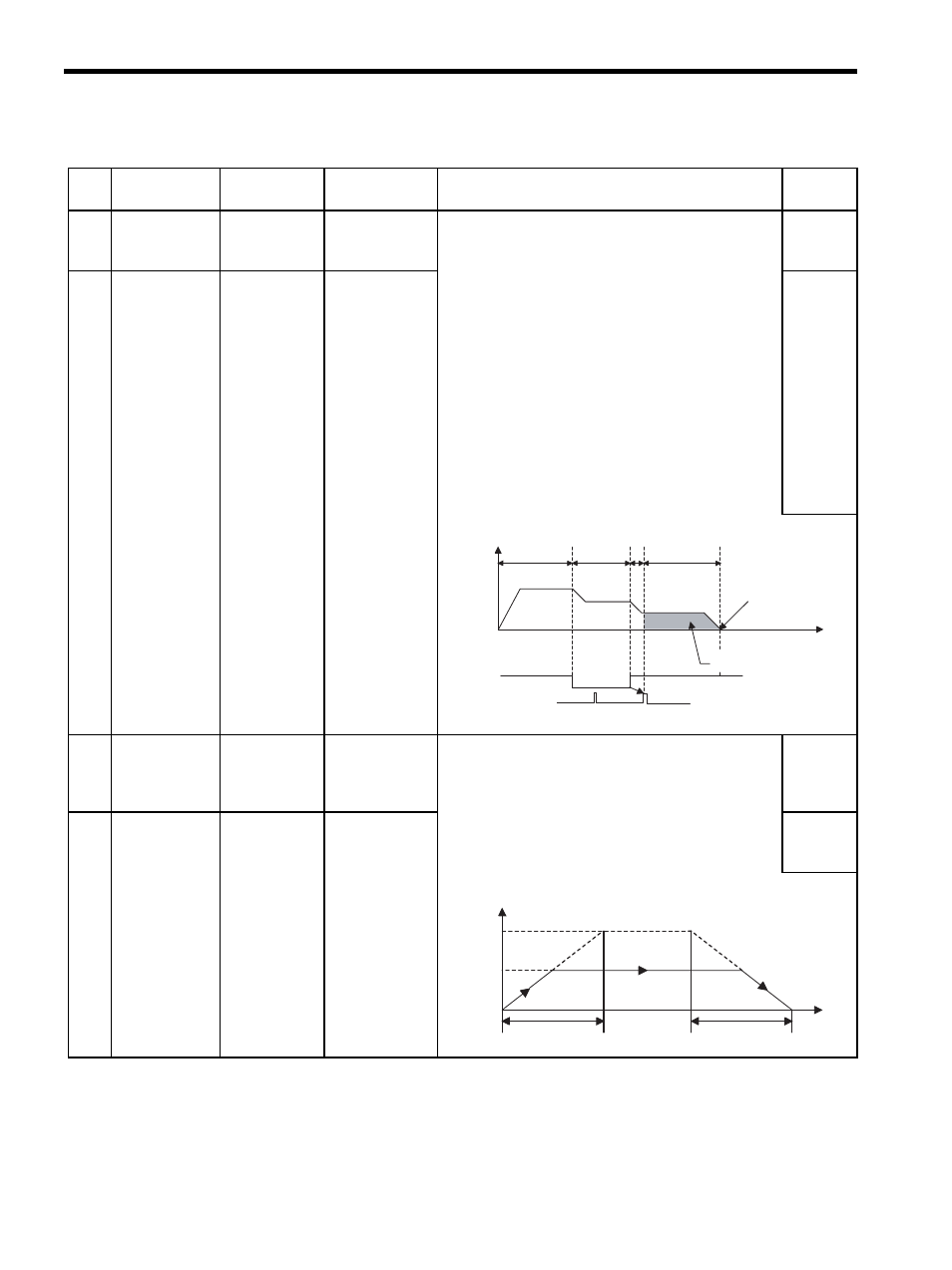
Set the linear acceleration/deceleration time for Speed,
Position Control, and Zero Point Return Modes.
Unit: ms
Set acceleration time from 0% to 100% (rated motor
speed).
The deceleration time is the same as the acceleration
time.
0
14
Linear Decel-
eration Time
Constant
(NDEC)
OW0D
0 to 32767
0
0
1.
2.
3.
4.
Reverse direction
←→ Forward direction
Speed
reference
Dog
(Deceleration LS)
Zero point signal
(Phase-C pulse)
Rapid traverse
speed
Approach
speed
Creep speed
Zero point return
position
Zero point
Zero point return final
travel distance
Time
NREF
Time
(t)
Speed
(%)
NR
(100%)
Speed
reference
0
NACC
NDEC