Sgdm and sgds – Yaskawa MP920 Motion Module User Manual
Page 394
9 Application Precautions
9.2.3 Parameter Settings
9-14
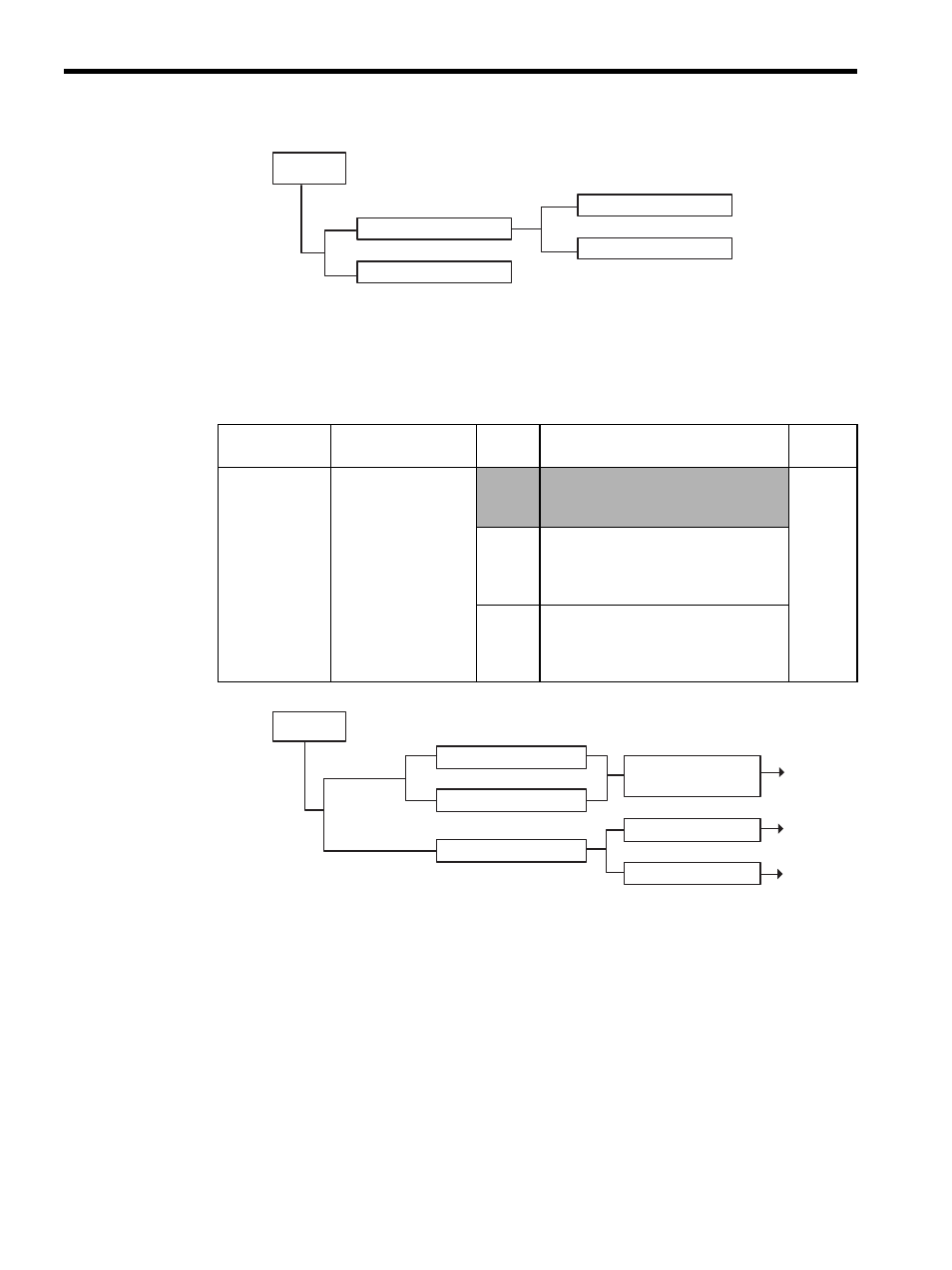
SGDM and SGDS
Select the stopping procedure as well as the processing to be performed after stopping the
Servomotor if the OT signal is input while the Servomotor is running.
Select the stopping procedure and processing to be performed after stopping the Servomotor
when the servo turns OFF.
Servo OFF
Dynamic brake released
Dynamic brake holding
Bit 7 = 0
Bit 7 = 1
Stopping procedure
After stopping
Dynamic brake to a stop
Free runs to a stop
Bit 6 = 0
Bit 6 = 1
Parameter No.
Description
Setting
Meaning
Factory
Setting
Pn001.1
Servomotor stopping
procedure for over-
travel
0
Use the same stopping method that is
used when the servo turns OFF (accord-
ing to Pn001.0)
0
1
The servo locks in Zero Clamp Mode
after deceleration to a stop with less than
the preset torque. (Torque setting: Pn406
emergency stop torque)
2
Placed in free-run status after decelera-
tion to a stop with less than the preset
torque. (Torque setting: Pn406 emer-
gency stop torque)
Pn001.1
=1 or 2
0
1
2
Dynamic brake to a stop
Free runs to a stop
Stopping procedure
After stopping
Pn001.1
setting
Pn001.1
= 0
Overtravel
Servo OFF
Zero clamping
Decelerate to a stop
Dynamic brake
released (servo OFF)
Pn001.0
= 0 or 1