Yaskawa MP920 Motion Module User Manual
Page 233
5.4 SVA-01A and SVA-02A Parameters
5-91
5
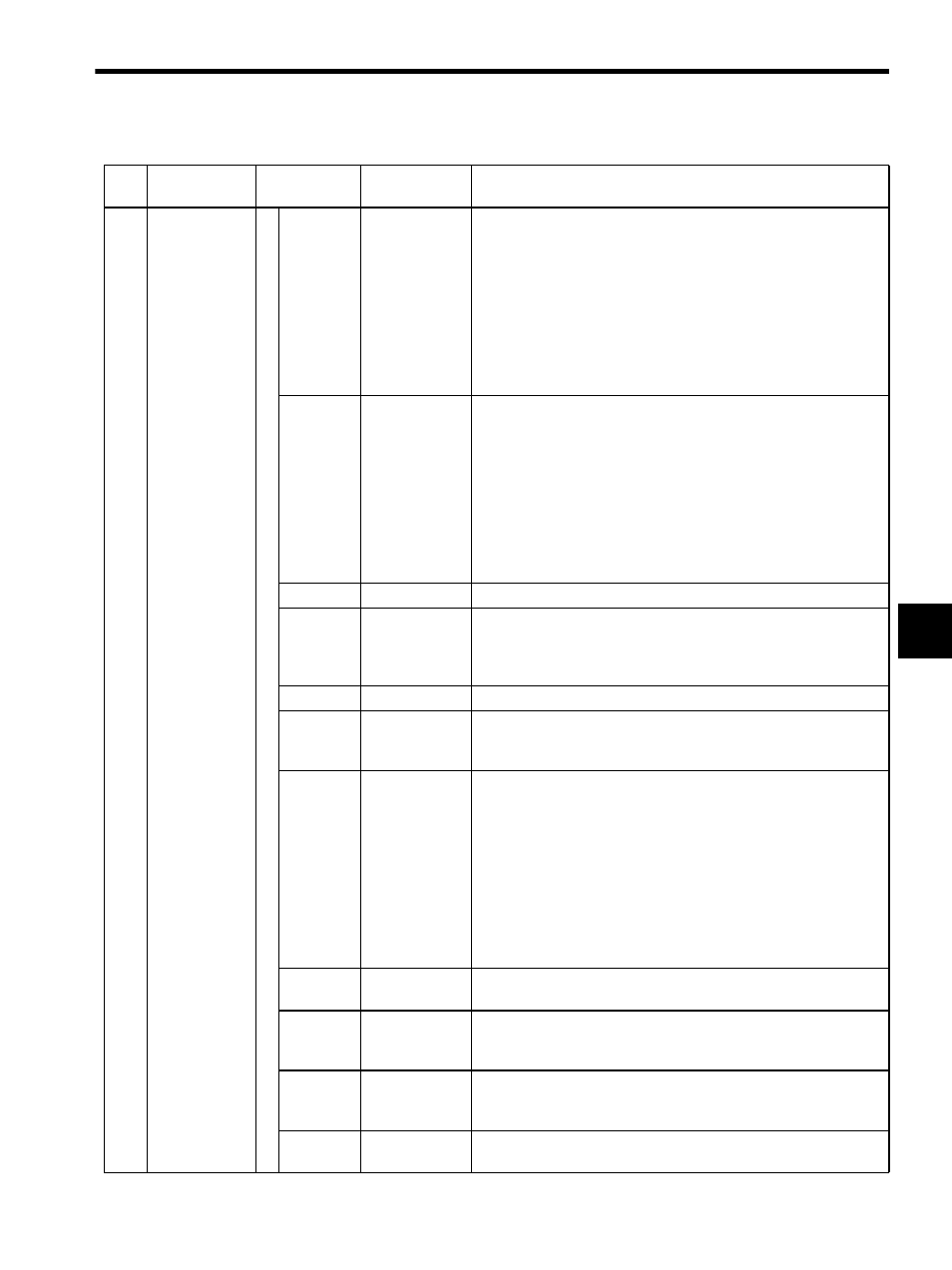
35
Alarms
(ALARM)
(cont’d)
Bit 3
Positive
Software Limit
(SOTF)
Valid if IB156: Zero Point Return Completed turns ON when the
positive software limit is enabled and a finite length axis is selected.
• OW20: Motion Command Code Interpolation
This bit turns ON when IL18: Reference Position in Machine
Coordinate System + OL26: Stopping Distance
≥ Positive Soft-
ware Limit (motion fixed parameter No. 27).
• OW20: Motion Command Codes Positioning, Feed. or Step
This bit turns ON when IL18: Reference Position in Machine
Coordinate System
≤ Positive Software Limit (motion fixed param-
eter No. 27).
Bit 4
Negative
Software Limit
(SOTR)
Valid if IB156: Zero Point Return Completed turns ON when the
negative software limit is enabled and a finite length axis is selected.
• OW20: Motion Command Code Interpolation
This bit turns ON when IL18: Reference Position in Machine
Coordinate System + OL26: Stopping Distance
≤ Negative
Software Limit (motion fixed parameter No. 29).
• OW20: Motion Command Codes Positioning, Feed. or Step
This bit turns ON when IL18: Reference Position in Machine
Coordinate System
≥ Negative Software Limit (motion fixed
parameter No. 29).
Bit 5
Not used.
−
Bit 6
Positioning
Time Over
(TIMEOVER)
Turns ON if bit 13 of IW00: Positioning Completed Signal does
not turn ON when the Positioning Completed Check Time
(OW34) is exceeded after bit 2 of IW15: Distribution Com-
pleted is turned ON.
Bits 7 to 9
Not used.
−
Bit 10
Control Mode
Error
(MODERR)
Turns ON when a move command is set at OW20: Motion Com-
mand Code in a mode other than Position Control Mode (OB002
is OFF).
Bit 11
Zero Point Not
Set
(ZSET_NRDT)
Turns ON when an attempt is made to execute one of the following
motion commands with the bit 3 of IW15: Zero Point Setting
Completed Signal turned OFF.
• POSING
• EX_POSING
• INTERPOLATE
• ENDOF-INTERPOLATE
• LATCH
It is valid when infinite length axis is set when an absolute encoder is
used.
Bits 12 to
16
Not used.
−
Bit 17
ABS Encoder
Count Exceeded
Turns ON when the absolute encoder count exceeds the range that the
Motion Module can handle.
It is valid if a finite length axis is set when an absolute encoder is used.
Bit 18
Broken PG Wire
Error
Turns ON when a broken PG wire is detected.
It is valid when the pulse calculation method selection is set to the A/
B mode in motion fixed parameters.
Bits 19 to
31
Not used.
−
Table 5.7 Motion Monitoring Parameters (cont’d)
No.
Name
Register
Number
Setting Range/
Bit Name
Description