2 differences in servo connectors – Yaskawa MP920 Motion Module User Manual
Page 186
5 SVA Module Specifications and Handling
5.3.2 Differences in Servo Connectors
5-44
5.3.2
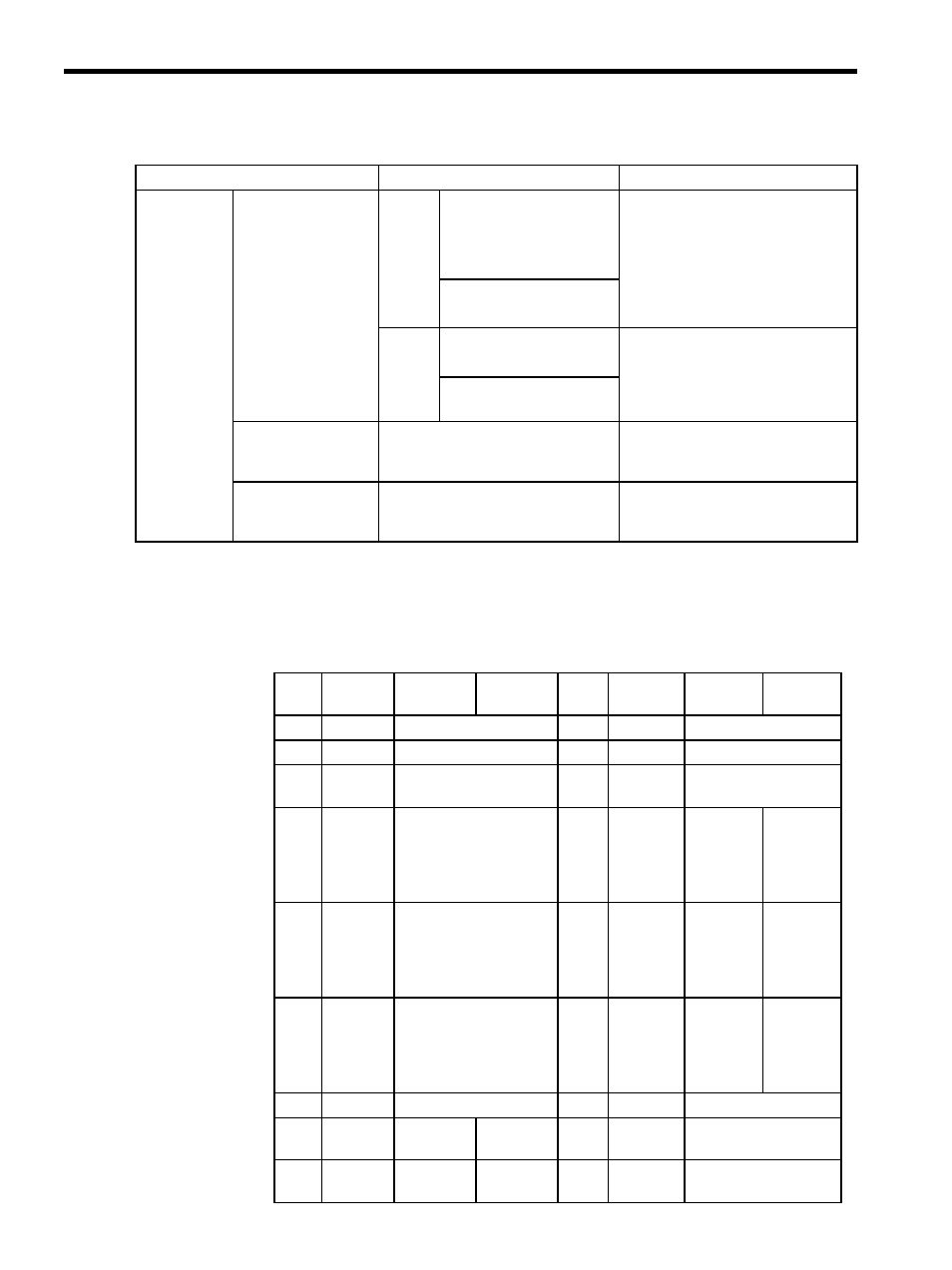
Differences in Servo Connectors
The following table shows differences in servo connectors between the SVA-01A and SVA-
02A Modules.
Hardware
Specifica-
tions
(cont’d)
External I/O
Inputs
6 points for each axis
None
• The general DI points of servo
connectors are used for the
OTR, OTF, and EXT.
• Allocate the DEC, RI, and RIC
to the LIO Module.
• ZERO cannot be used.
• OTF
• OTR
• DEC
• ZERO
• EXT
• RI
1 common point for reserve
• RIC
Outputs 2 points for each axis
None
• BRK OUT, RO, and ROC have
been deleted.
• BRK OUT
• RO
1 common point for reserve
• ROC
Absolute Battery
Inputs
Battery inputs from external interfaces
are output to SERVOPACKs via servo
connectors 1CN to 4CN.
Connect the battery power supply
directly to SERVOPACKs.
+24 V Inputs for Ser-
vo I/O
+24 inputs from external interfaces are
output to SERVOPACKs via servo con-
nectors 1CN to 4CN.
Connect the +24 V input connector to
the 3CN connector.
(cont’d)
Item
SVA-01A
SVA-02A
Pin
Signal
Name
SVA-01A
SVA-02A
Pin
Signal
Name
SVA-01A
SVA-02A
1
SG
Ground (for analog)
10
0V (24V)
0 V (24 V)
2
NREF
Speed reference
11
0V (24V)
0 V (24 V)
3
PA
5-V differential pulse
input (+)
12
PCON
P operation reference,
DO2
4
PAL
5-V differential pulse
input (-)
13
OTR
Overtravel
(-)
General-
purpose
output
(OTR)
DO-4
5
PC (5V)
5-V differential pulse
input (+)
14
OTF
Overtravel
(+)
General-
purpose
output
(OTF)
DO-3
6
PCL (5V) 5-V differential pulse
input (-)
15
General-
purpose
DI
Not used.
General-
purpose
input
(OTF)
DI-3
7
SG
Ground
16
+24V
+24 V power supply
8
AI_IN
Not used.
Analog
input
17
SV ALM
Servo alarm input, DI-0
9
AO_OUT Not used.
Analog
output
18
BRK
Brake ON input, DI-2