Parameters motion programs can write, Parameters svb-01 motion commands can write – Yaskawa MP920 Motion Module User Manual
Page 300
6.2 SVB-01 Parameters
6-65
6
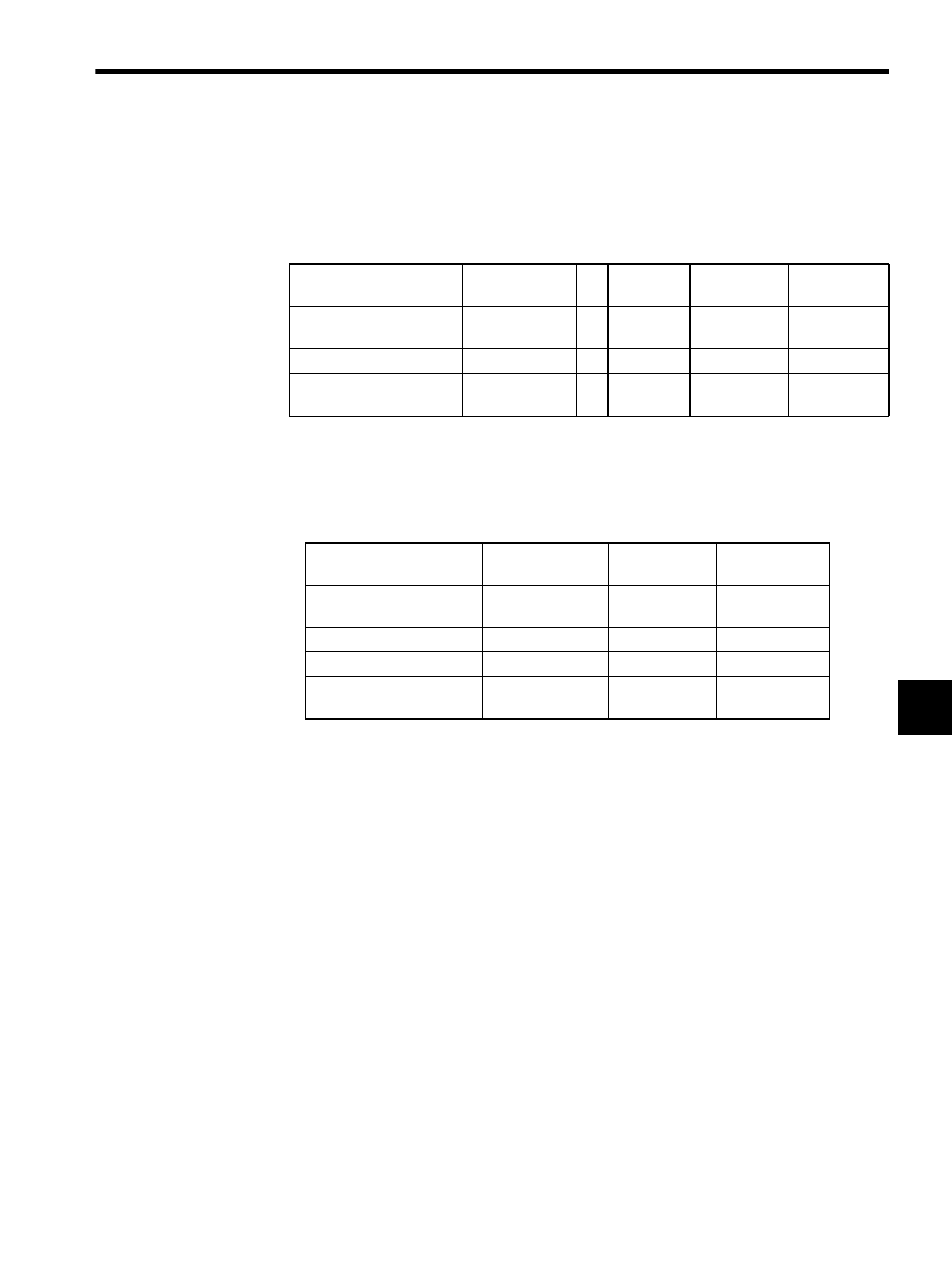
Parameters Motion Programs Can Write
The following SERVOPACK parameters can be written from a motion program. (SERVO-
PACK parameters are simultaneously written whenever setting parameters are written from
a motion program).
Parameters SVB-01 Motion Commands Can Write
Motion commands can be used for the following parameters to write settings on the Control-
ler to the SERVOPACK.
The following procedure must be used to change parameters.
• Example showing the procedure for writing position loop gain from a motion program.
Parameter Name
Motion Program
Format
MP920
Σ Series
SERVOPACK
Σ-II Series
SERVOPACK
2nd Step Linear Acceler-
ation Time Constant
ACC[X]6000;
→ OW0C Cn-0020
Pn80B
Average Move Time
SCC[X]6000;
→ OW14 Cn-0026
Pn812
2nd step Linear Deceler-
ation Time Constant
DCC[X]
→ OW0D −
Pn80E
Parameter Name
Controller
Σ Series
SERVOPACK
Σ-II Series
SERVOPACK
Exponential Acceleration
Time Constant
OW14
Cn-002E
Pn811
Speed Loop Gain
OW1D
Cn-0004
Pn100
Position Loop Gain
OW10
Cn-001A
Pn102
Feed Forward
Compensation
OW11
Cn-001D
Pn109
WHILE OWxx20 <> 0; Check to see if the motion command OW20 is set to 0 (NOP).
EOX; 1-scan WAIT command
WEND;
OWxx10=200; Position loop gain: Stores the value at OW10.
OWxx20=15; Set the motion command OW20 to 15 (KPS command).
WHILE IWxx14 <>15; Waits until the command response is 15 (KPS command).
EOX;
WEND;
OWxx20=0; Set the motion command OW20 to 0 (NOP).