Yaskawa MP920 Motion Module User Manual
Page 44
2 Motion Control
2.2.4 Phase Control Mode
2-18
3. Select the Phase Control Mode (PHCON) (bit 3 of OW00).
At this time, also set Phase Reference Disable (PHREFOFF: bit 7 of OW00). Nor-
mally, this bit is set to OFF for electronic shaft applications, and it is set to ON for elec-
tronic cam applications.
4. To start operation, set the RUN Servo ON (RUN) to ON (bit 0 of OW01).
Phase control will be performed for the axis according to the specified motion parame-
ters. Even while phase control is being performed, the motion parameter settings can be
changed.
5. To stop operation, set the RUN command (RUN) and the phase control mode (PHCON)
to OFF.
User Program Example 1: Electronic Shaft
Example of RUN Operation
Phase control can be called “speed control with position compensation” or “position control
with 100% speed feed forward.” “Position” means the motor angle of rotation, and is there-
fore called “phase control.” An electronic shaft can be configured using this phase control.
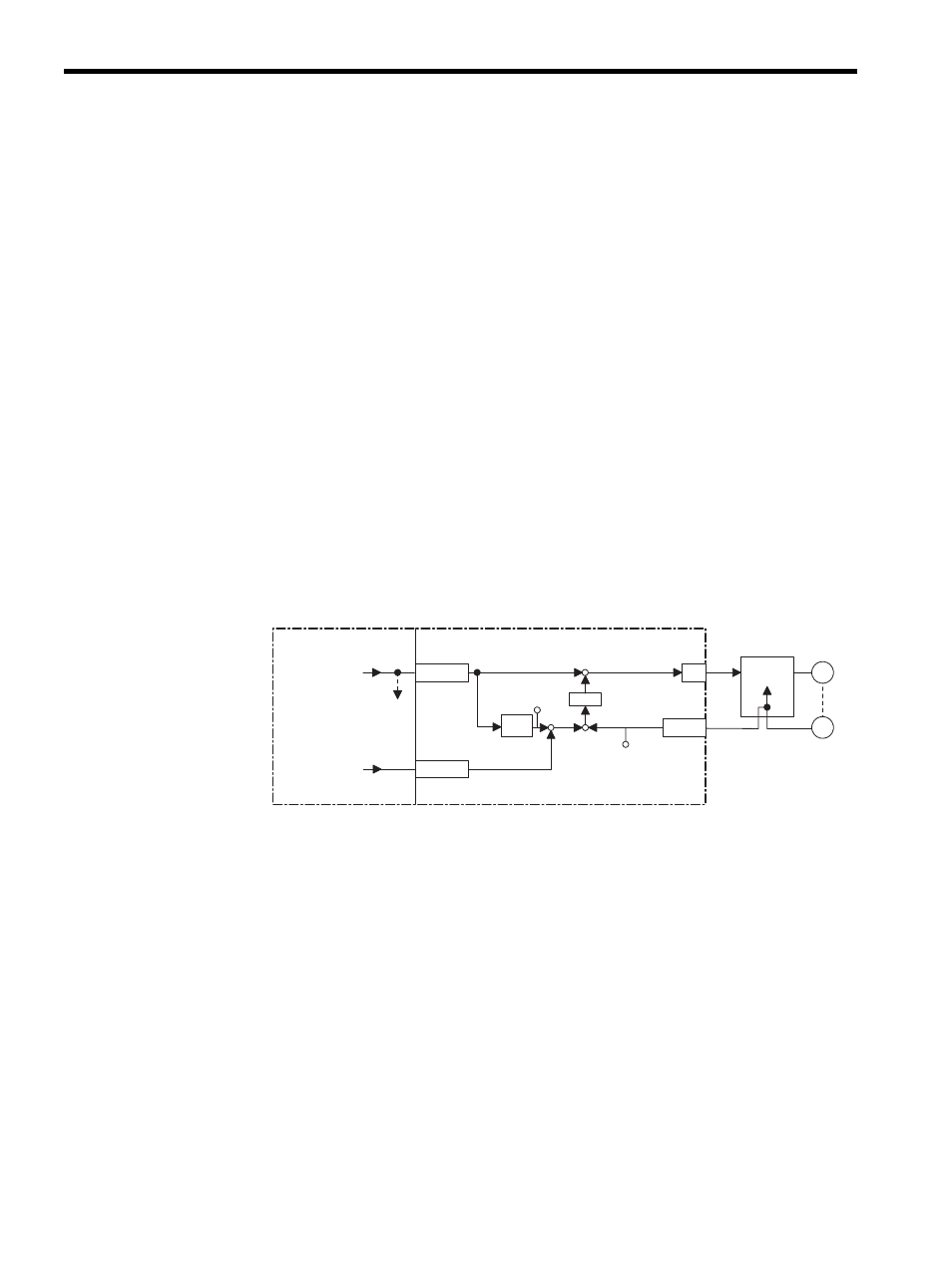
Fig. 2.6 shows a block diagram of a phase control loop.
Fig. 2.6 Block Diagram of Phase Control Loop
The rotational phase of the motor can be managed (controlled) using the above method.
This control loop is processed in the SVA-02A Module. Therefore, the user can easily con-
trol the electronic shaft simply by selecting the phase control mode on the CPU Module and
providing the required parameters for the SVA Module.
Speed
control
OWCO15
D/A
Integra-
tion
PI
Counter
OLCO16
NREF
SVA Module
To other
machine
CPU Module
Standard
speed
reference
setting
Position
compensation
setting
PHBIAS
M
PG
Servo drive
+
ε
+
-
+
+
APOS
IL
08
*2
*1
*3
±
*1 Integrates the reference speed reference, and calculates the corresponding position (pulse).
*2 Generates the speed reference from the target position (CPOS) and current position
(APOS) error
ε. This is the position (phase) compensation.
*3 To move the phase, the distance to be moved (the angle of rotation of the motor axis
converted to the number of pulses) can be added as the phase compensation setting.