Yaskawa MP920 Motion Module User Manual
Page 278
6.2 SVB-01 Parameters
6-43
6
35
Alarm
(ALARM)
(cont’d)
Bit 17
ABS Encoder
Count Exceeded
(ABSOVER)
Turns ON when the absolute encoder count exceeds the maximum
limit for the SVB Modules.
Bits 18 to
31
Not used.
−
37
Servo Driver
Alarm Code
(SVALARM)
IW24
-32768 to 32767
Used to monitor alarm codes that are generated in MECHATROLINK
servos.
Refer to MECHATROLINK Servo Alarm Codes (IW
24) in 8.2
Alarms and Actions Taken for details.
Code 99H is displayed during normal operation.
38
MECHA-
TROLINK
Servo I/O
Monitor
IW25
Used to monitor MECHATROLINK servo I/O monitor information.
Bit 0
Forward OT
Input (P-OT)
Forward rotation OT input signal
Bit 1
Reverse OT
Input (N-OT)
Reverse rotation OT input signal
Bit 2
Deceleration LS
Input (DEC)
Deceleration LS input signal
Bit 3
Encoder Phase-A
Input (PA)
Encoder Phase-A input signal
Bit 4
Encoder Phase-B
Input (PB)
Encoder Phase-B input signal
Bit 5
Encoder Phase-C
Input (PC)
Encoder Phase-C input signal
Bits 6 to 8
Not used.
−
Bit 9
Brake status
input (BRK)
Brake status input signal
Bits 10 to
15
Not used.
−
39
Speed Refer-
ence Output
Monitor (RV-
MON)
IL26
-2
31
to 2
31
-1
Used to debug the system.
41
Cn Constant
Read Data
(CNMON)
IL28
-2
31
to 2
31
-1
When the motion command (OW20) is set to 17, the SERVO-
PACK Cn constant data specified in OW35 is stored.
Position Buffer
Read Data
(CNMON)
Position data from the position buffer specified at OL38: Position
Buffer Access Number is read and stored at this parameter when
motion setting parameter OB21F: Position Buffer Read turns ON.
It takes about 2 scans from the time that OB21F: Position Buffer
Read turns ON until data is stored at this register.
43
Position Refer-
ence Output
Value Monitor
(XREFMON)
IL2A
-2
31
to 2
31
-1
Used to debug the system.
1 = 1 pulse
45
Not used.
IL2C
−
−
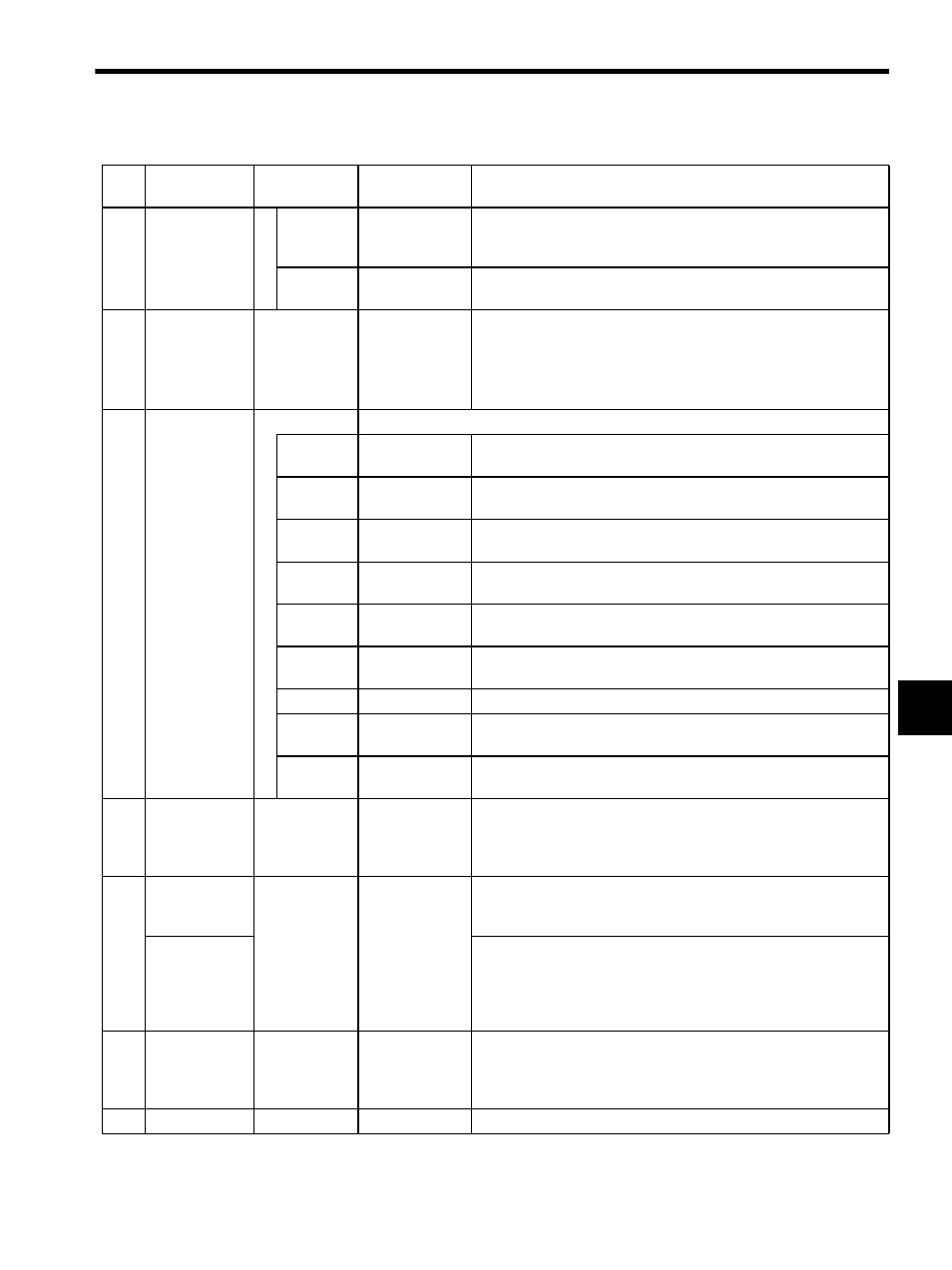
Table 6.4 Motion Monitoring Parameters (cont’d)
No.
Name
Register
Number
Setting Range/
Bit Name
Description