Yaskawa MP920 Motion Module User Manual
Page 128
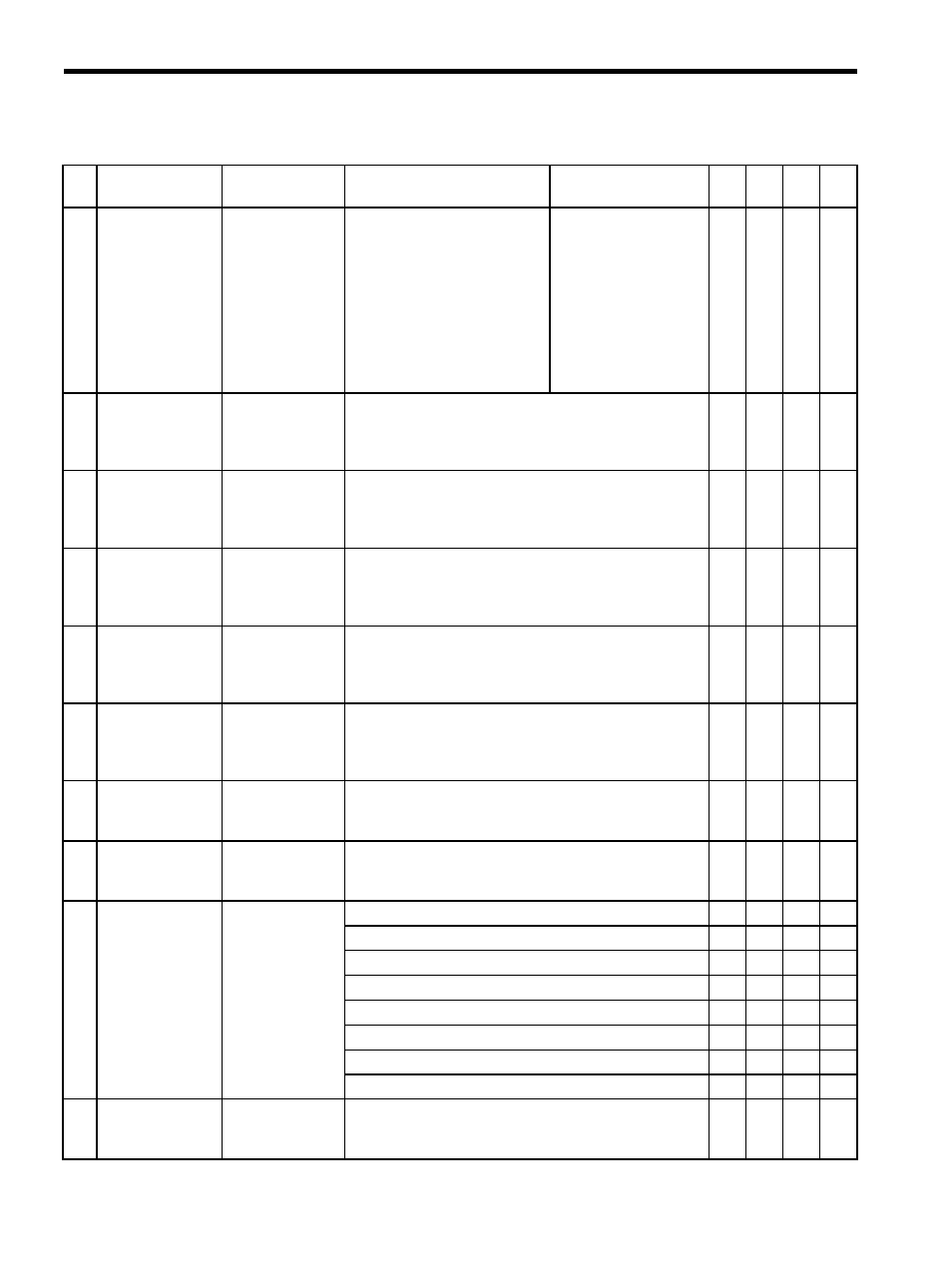
4 Parameters
4.2.1 Motion Fixed Parameters
4-8
18
Number of Digits
Below Decimal
Point
(DECNUM)
0 to 5
(Default = 3)
Sets the number of digits right of
the decimal point in commands.
(Example)
With 3 digits right of the decimal
point
mm: 1 reference unit = 0.001
mm
deg: 1 reference unit = 0.001 deg
inch: 1 reference unit = 0.001
inch
Minimum reference unit
is determined by this
parameter as well as by
the Reference Unit
Selection (see fixed
servo parameter no. 17.).
√
√
√
√
19
Travel Distance
Per Machine
Rotation
(PITCH)
1 to 2
31
-1
(Default = 10000)
1 = 1 reference unit
√
√
√
√
21
Servomotor Gear
Ratio
(GEAR_
MOTOR)
1 to 65535
(Default = 1)
1 = 1 rotation
√
√
√
√
22
Machine Gear
Ratio
(GEAR_
MACHINE)
1 to 65535
(Default = 1)
1 = 1 rotation
√
√
√
√
23
Infinite Length
Axis Reset
Position
(POSMAX)
1 to 2
31
-1
(Default =
360000)
1 = 1 reference unit
√
√
√
√
25
Maximum Num-
ber of Absolute
Encoder Turns
(MAXTURN)
1 to 2
31
-1
(Default = 99999)
1 = 1 rotation
√
√
√
−
27
Positive Software
Limit
(SLIMP)
-2
31
to 2
31
-1
(Default = 2
31
-1)
1 = 1 reference unit
√
√
√
√
29
Negative Software
Limit
(SLIMN)
-2
31
to 2
31
-1
(Default = -2
31
)
1 = 1 reference unit
√
√
√
√
31
Zero Point Return
Method
(ZRETSEL)
0 to 7
(Default = 0)
0: DEC1 + Phase-C pulse
√
√
√
−
1: ZERO
√
−
√
−
2: DEC1 + ZERO
√
√
√
3: Phase-C pulse
√
√
√
−
4: DEC2 + ZERO
√
−
−
√
5: DEC1 + LMT + ZERO
√
−
−
√
6: DEC2 + Phase-C pulse
√
√
−
−
7: DEC1 + LMT + Phase-C pulse
√
√
−
−
32
Backlash
Compensation
(BKLSH)
0 to 32767
(Default = 0)
1 = 1 reference unit
√
√
−
−
Table 4.2 Motion Fixed Parameters (cont’d)
No.
Name
Setting Range/
Bit Name
Meaning
Remarks
SVA
-01A
SVA
-02
A
SVB
-01
PO-
01