Yaskawa MP920 Motion Module User Manual
Page 222
5 SVA Module Specifications and Handling
5.4.2 Motion Setting Parameters
5-80
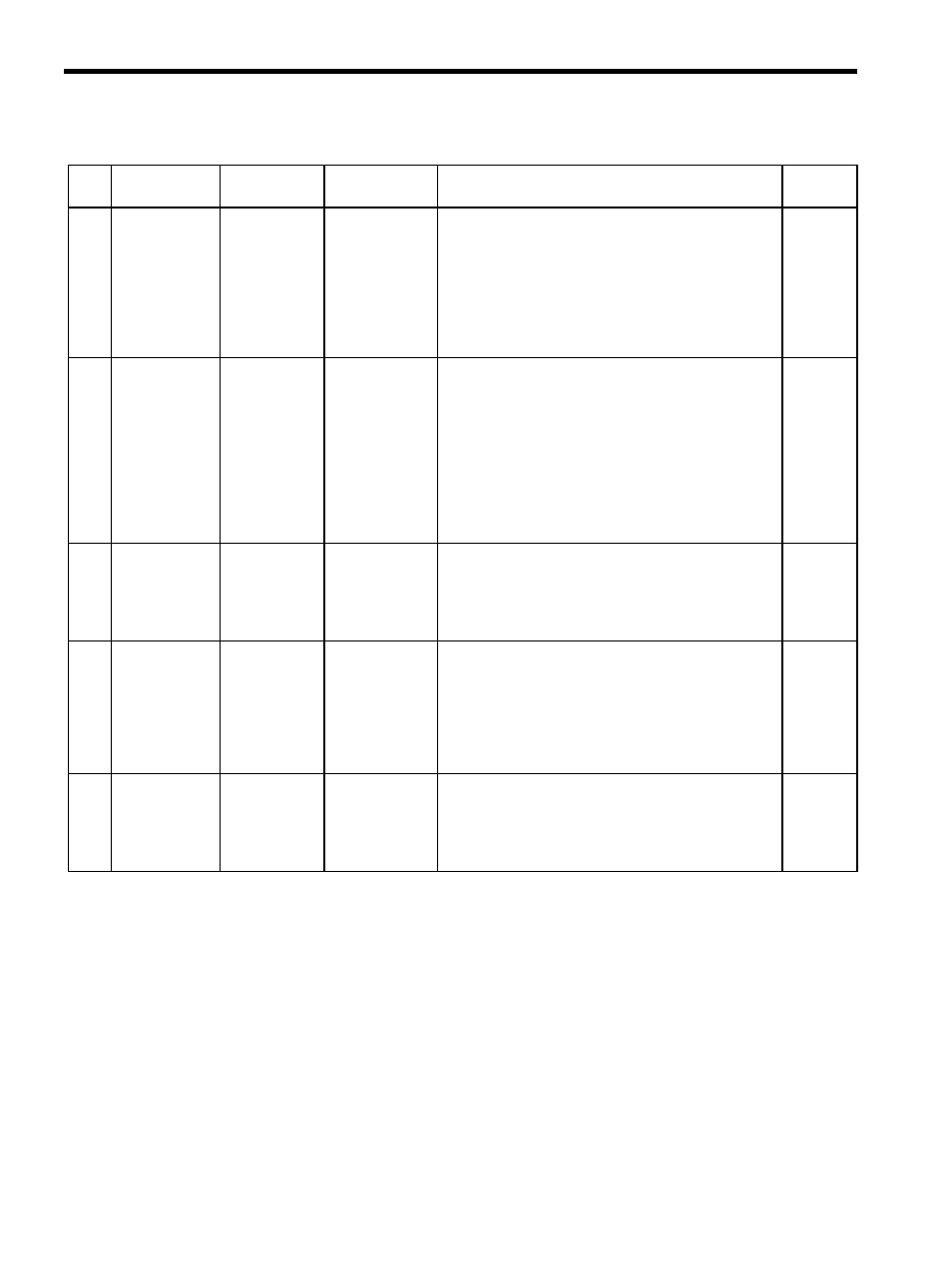
52
Zero Point Po-
sition Output
Width
(PSETWIDTH)
OW33
0 to 65535
Used when an OW20: Motion Command Code is
used in Position Control Mode.
Set the zero point position range. IB171: Zero Point
Position will turn ON if 0
≤ |IL18: Reference Posi-
tion in Machine Coordinate System|
≤ Zero Point Posi-
tion Output Width when IB156: Zero Point Return
Completed Status turns ON.
10
53
Positioning
Completed
Check Time
(PSETTIME)
OW34
0 to 65535
Used when OW20: Motion Command Code is used
in Position Control Mode.
Set limits for detecting bit 6 of IL22: Positioning
Time Over in 1 = 1 ms. A positioning time over alarm
will be generated if bit 13 of IW00: Positioning Time
Completed Signal does not turn ON when this range is
exceeded after bit 2 of IW15: Distribution Com-
pleted turns ON.
The completion of positioning will not be checked if this
parameter is set to “0.”
0
54
Position Con-
trol Integral
Time (PTi)
OW35
0 to 32767
Used in Position Control Mode or Zero Point Return
Mode.
Set integral time in 1 = 1 ms when using position loop
and PI control (see bit 8 of OW21). Integration will
not be performed if this parameter is set to “0.”
300
55
Upper/lower
Limit for Posi-
tion Control In-
tegration
(ILIMIT)
OW36
0 to 32767
Used in Position Control Mode or Zero Point Return
Mode.
Set the upper and lower integration limits when using
position loop and PI control (Refer to bit 8 of
OW21). Integral output will be limited within the
range set here when the integral output value exceeds this
range.
32767
56
Primary Lag
Time Constant
(LAGTI)
OW37
0 to 32767
Used in Position Control Mode or Zero Point Return
Mode.
Set the primary lag time constant in the position loop in 1
= 1 ms. The primary lag will not be calculated if this
parameter is set to “0.”
0
Table 5.6 Motion Setting Parameters (cont’d)
No.
Name
Register
Number
Setting Range/
Bit Name
Description
Factory
Setting