Important – Yaskawa MP920 Motion Module User Manual
Page 93
2.4 Position Control Using Motion Commands
2-67
2
position will be the machine coordinate system zero point.
A zero point position offset value can also be set. (If Zero Point Offset OL06 is set
in advance to 100, the position data will be 100.)
10.The zero point return operation is completed when the axis enters the Positioning Com-
pleted Range (OW0E) after Distribution Completed (bit 2 of IW15 is ON).
When the zero point return operation is completed, the ZRNC Zero Point Return Com-
pleted (bit 6 of IW15) turns ON.
11.After checking that the ZRNC Zero Point Completed (bit 6 of IW15) is ON, set
NOP (= 0) in the motion command code (OW20).
1. If the machine is in Area B after the power is turned ON, the return cannot be performed correctly.
Be sure to move the machine back to Area A before performing a return.
2. The deceleration limit switch width must be at least twice that of the high-speed scan setting value.
The criteria for the deceleration limit switch width (L) can be calculated using the formula shown
below.
• Ts (s) = High-speed scan set value (ms)/1000
• F (m/s) = k
× {NR × n × FBppr}/60
F:
100% speed (m/s)
k:
Weight of 1 pulse (m/pulse)
NR:
Rated rotation speed (min
-1
)
FBppr: Feedback pulse resolution (p/r)
n:
Pulse magnification (1, 2, or 4)
• t (s) = Linear acceleration/deceleration time (s)
•
α (m/s
2
) = f/t
If
α = acceleration/deceleration time constant (m/s
2
), the following equation applies.
L = 1/2 ·
α (2 × Ts)
2
= 2
α Ts
2
3. When a short distance is set for the zero point return final travel distance, the axis returns to the
zero point after the zero point has been passed once.
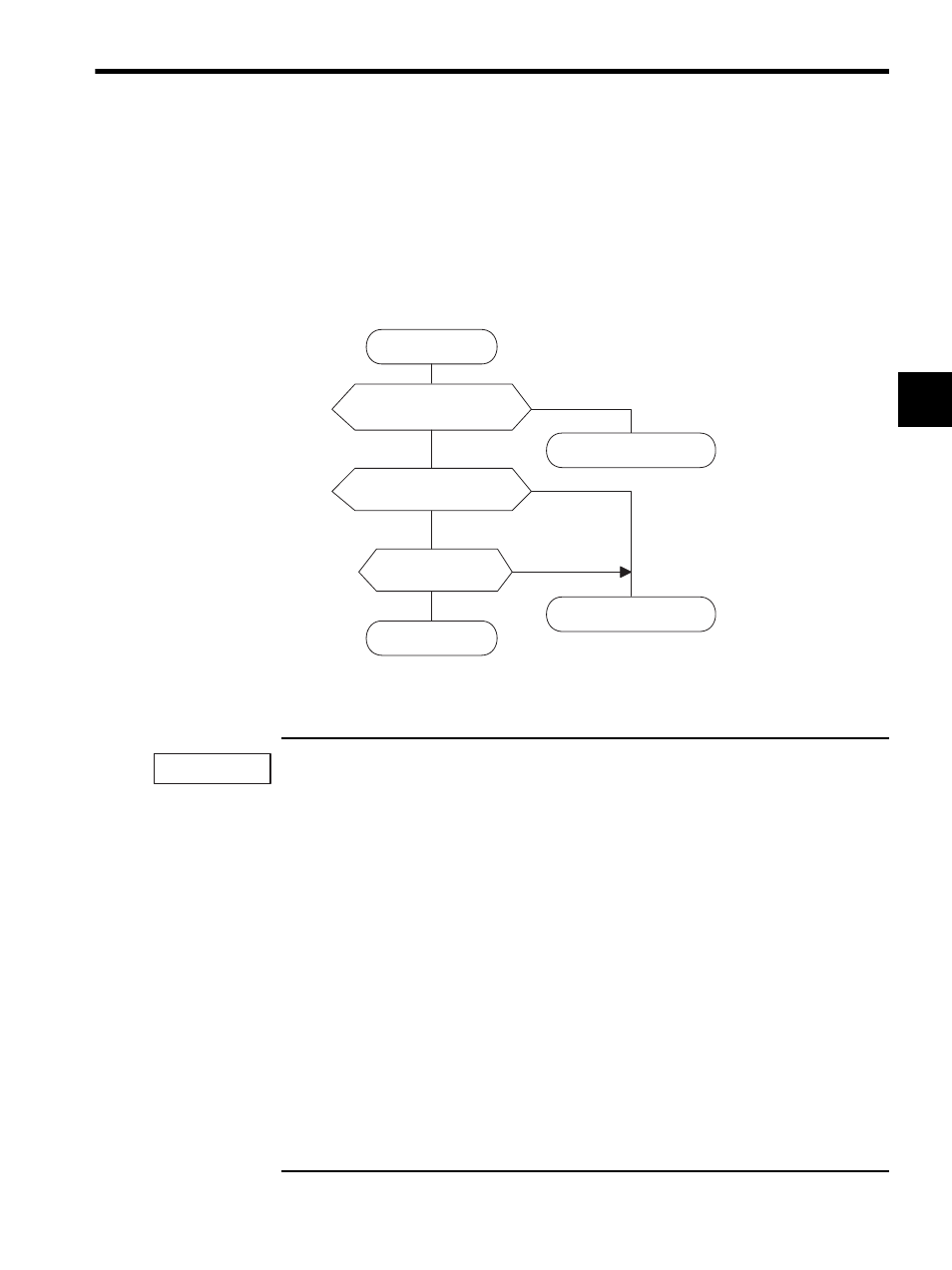
ZRET
End condition check
YES
YES
NO
NO
YES
NO
Motion command response
= ZRET?
Motion command status
BUSY = OFF?
ZRNC operation status =
ON?
Return (ZRET completed)
Return (Other motion
command executing)
Return (ZRET executing)
IMPORTANT