5 interpolation (interpolate, end_of_interpolate), Overview, Details – Yaskawa MP920 Motion Module User Manual
Page 96
2 Motion Control
2.4.5 Interpolation (INTERPOLATE, END_OF_INTERPOLATE)
2-70
2.4.5
Interpolation (INTERPOLATE, END_OF_INTERPOLATE)
Overview
This command performs interpolation feeding using the position data distributed from the
CPU Module.
Details
Use the following procedure to perform interpolation feed operations.
1. Set the initial values for the motion fixed parameters and the motion setting parameters
according to the user’s machine.
2. Set the Position Control Mode (PCON) (bit 2 of OW00).
3. Set the Position Reference Setting (OL12).
If required, set any motion setting parameters to use with interpolation (INTERPO-
LATE), such as the Filter Time Constant Setting (OW14).
4. Set RUN Servo ON (RUN) to ON (bit 0 of OW01).
For the PO-01 Module, set Excitation (RUN) to ON.
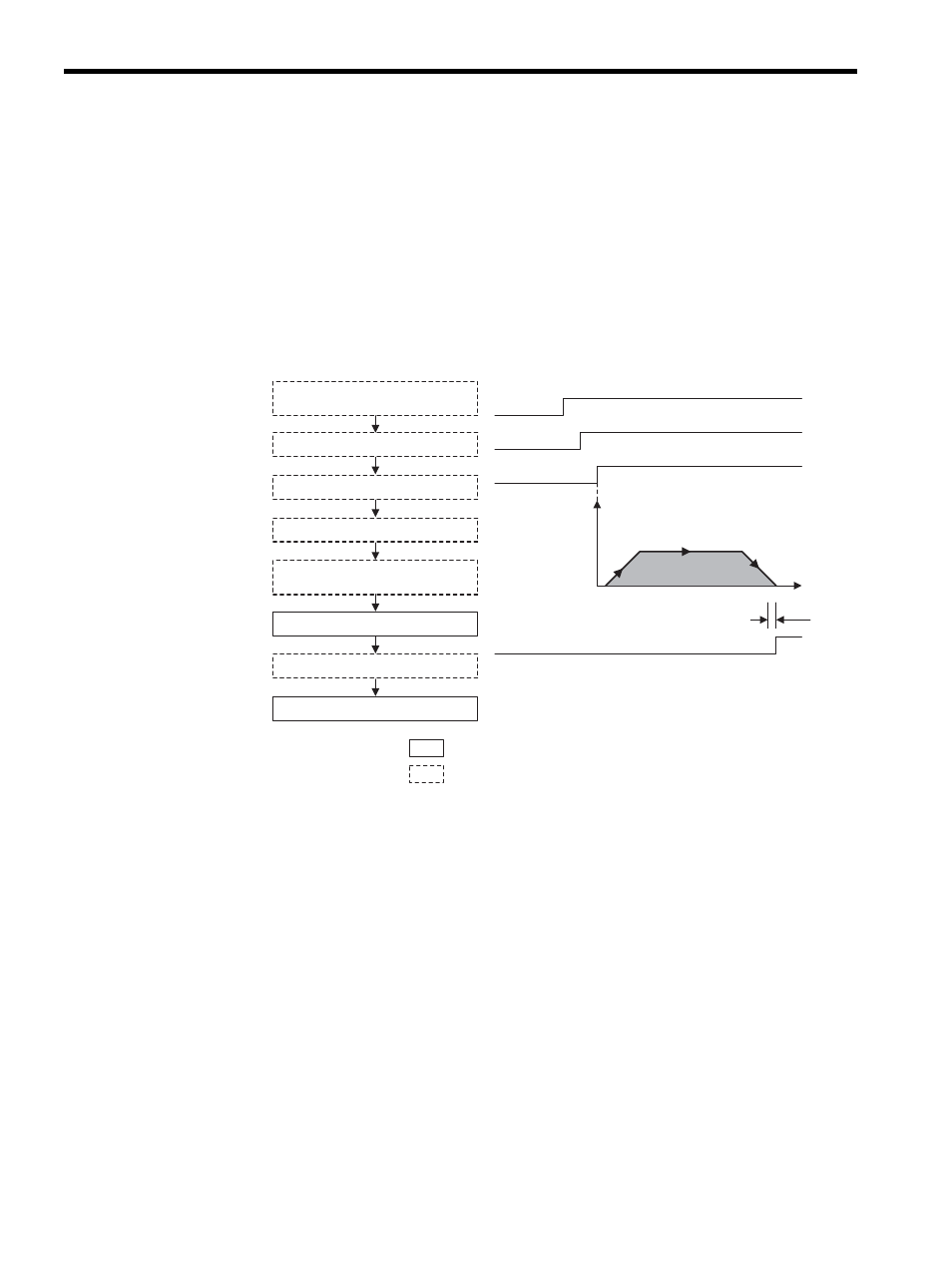
1. Set the motion fixed parameters.
Set the motion setting parameter initial values.
2. Set the position control mode (PCON).
3. Set the motion setting parameters.
4. Set Servo ON (RUN) to ON.
5. Execute the interpolation
(INTERPOLATE) motion command.
6. Stop position reference (OLC012) refreshing.
PCON
RUN
Motion command
(INTERPOLATE)
Speed
(%)
0
POSCOMP
The axis starts interpolation feed operations.
Positioning completed signal (POSCOMP)
turned ON.
Position
Positioning completed range
Time (t)
: System execution
: User settings