3 motion monitoring parameters – Yaskawa MP920 Motion Module User Manual
Page 351
7.3 PO-01 Parameters
7-49
7
7.3.3
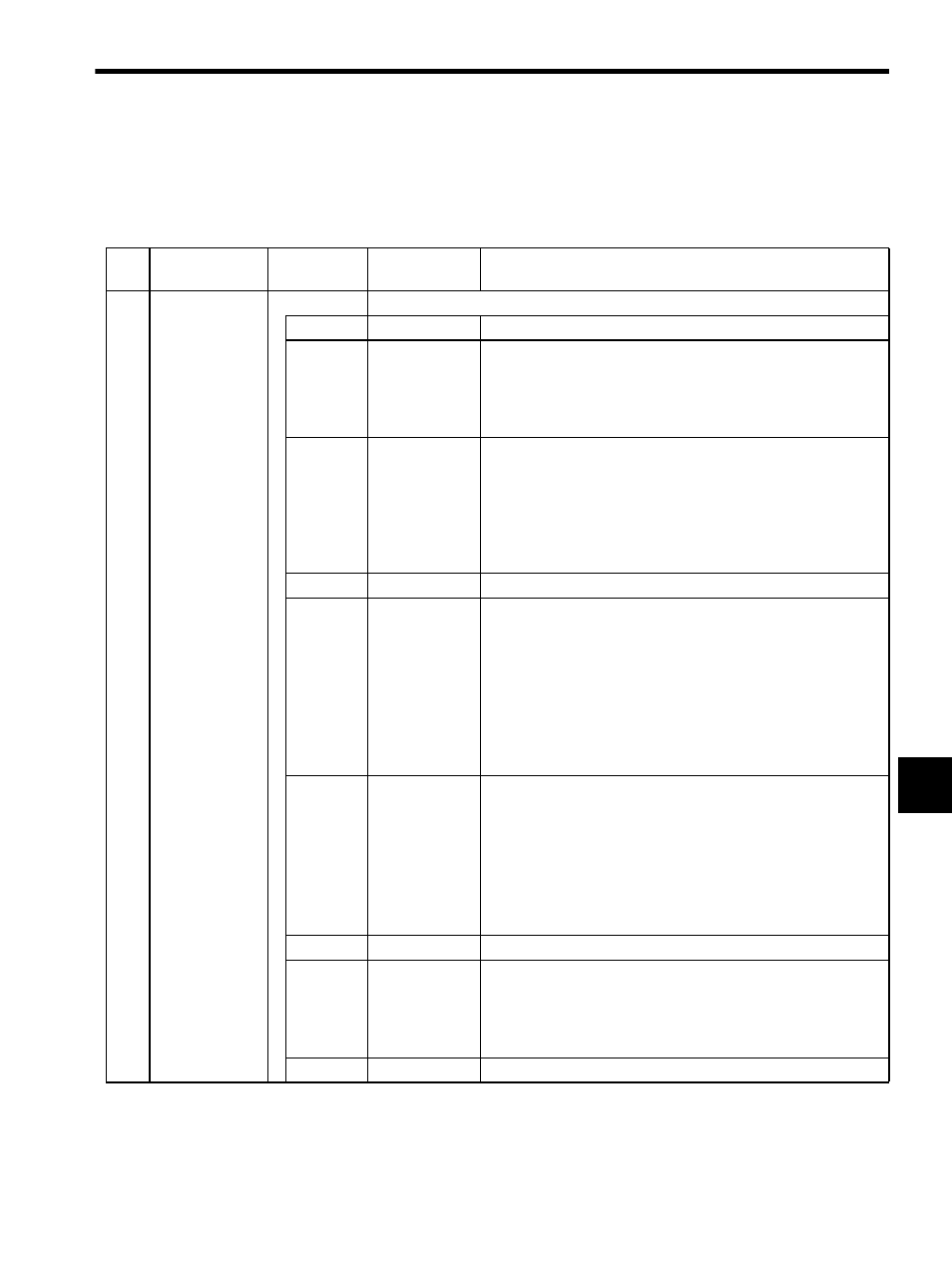
Motion Monitoring Parameters
Table 7.11 Motion Monitoring Parameters
No. Name
Register
No.
Setting
Range/
Bit Name
Description
1
RUN Status
(RUNSTS)
IW00
Monitors PO-01 Module operating status. The bit configuration is described below.
Bit 0
Not used.
−
Bit 1
Motion Setting
Parameter
Setting Error
(PRMERR)
Turns ON when one or more of the motion setting parameters
(OW00 to OW3F) is set outside the setting range.
In this case, the most recent motion setting parameter number that
caused the setting range alarm will be indicated at IW0F:
Parameter Number Out of Range.
Bit 2
Motion Fixed
Parameter
Setting Error
(FPRMERR)
Turns ON when a motion fixed parameter is set outside the setting
range.
In this case, the most recent motion setting parameter number that
caused the setting range alarm plus 100 will be indicated at
IW0F: Parameter Number Out of Range.
This parameter will turn OFF automatically if an ordinary motion
fixed parameter is set from the MPE720.
Bits 3 to 6
Not used.
−
Bit 7
Motion
Controller RUN
Ready
(SVCRDY)
Turns ON when RUN preparations for the PO-01 Module have been
completed.
The following may be reason why RUN preparations are not com-
pleted.
• Major damage has occurred.
• Axis that is not used was selected (motion fixed parameter set-
ting).
• Motion fixed parameter setting error.
• Motion fixed parameters are being changed.
Bit 8
Motion Control-
ler RUN
(SVCRUN)
Turns ON under the following conditions.
• IB07: RUN Ready turns ON.
• OB002: Position Control Mode Flag turns ON.
• OB010: Excitation ON signal turns ON.
When this bit is ON and an alarm is generated, the axis will not
move even if a motion command is issued.
Clear the alarm, set the motion command to “NOP” for 1 scan or
more, and then set the motion command again.
Bits 9 to 12 Not used.
−
Bit 13
Positioning
Completed
Signal
(POSCOMP)
Turns ON when Distribution Completed (bit 2 of IW15) turns
ON as follows:
|IL08: Current Position
− IL18: Machine Coordinate Sys-
tem Reference Position|
≤ OW0E: Positioning Completed
Range
Bits 14, 15
Not used.
−