3 program example, Feed example – Yaskawa MP920 Motion Module User Manual
Page 324
7 PO-01 Module Specification and Handling
7.2.3 Program Example
7-22
7.2.3
Program Example
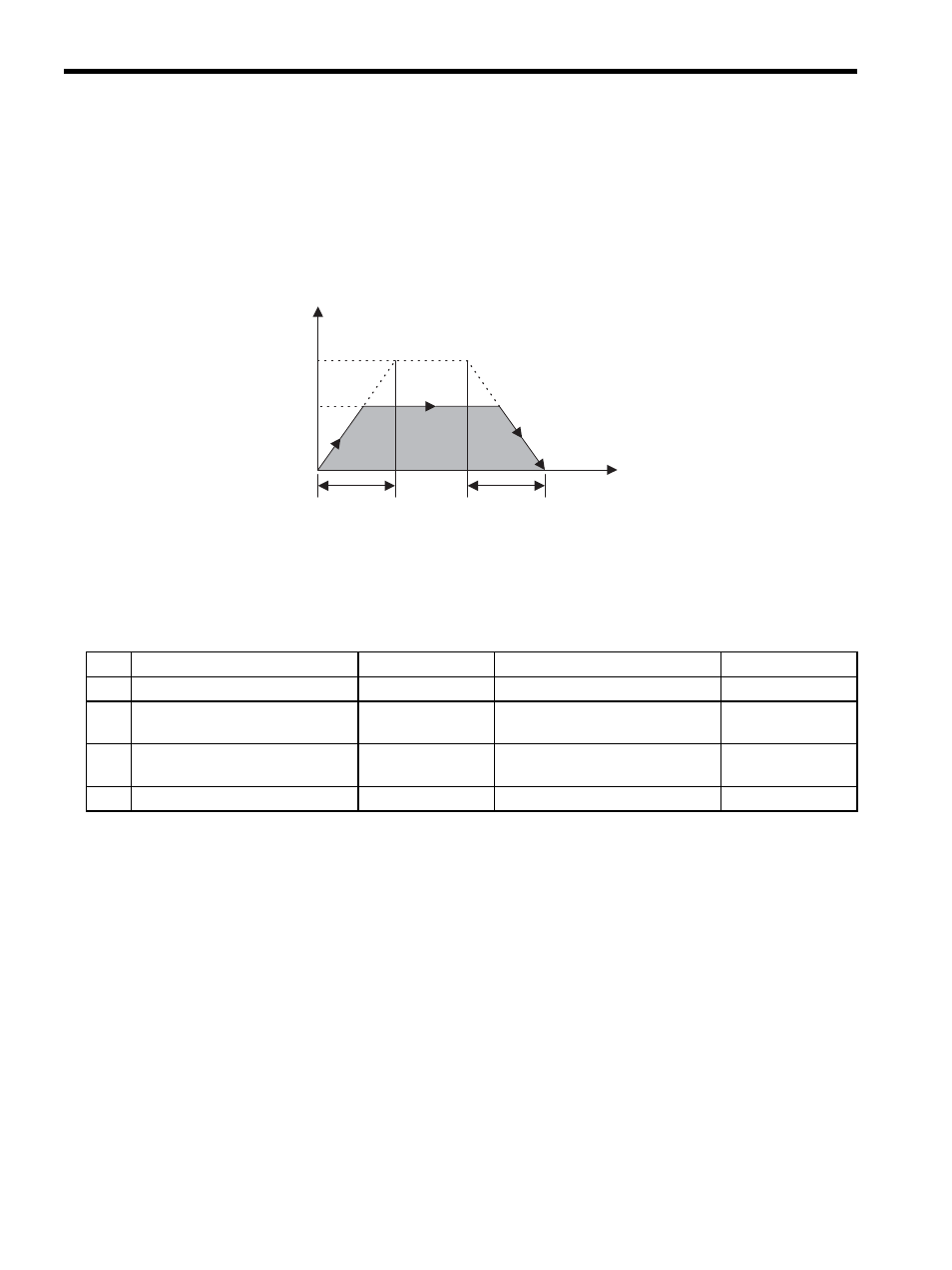
This section shows an example of a simple user program. The program runs a test to confirm
pulse motor operation and then performs a simple feed operation as an example.
Feed Example
Fig. 7.1 Feed Example
1. Set the motion fixed parameters for your machine.
The following table shows relevant parameters when a PO-01 Module is used.
2. Set the motion setting parameters used in Position Control Mode.
There are three ways to set the motion setting parameters.
• From the MPE720 Setting Parameter Window
• From the ladder logic program
• From the motion program
NACC
NEDC
Feed speed
NR
(100%)
Speed
(%)
RV
0
Time (t)
Table 7.6 Examples of Fixed Parameter Settings
No.
Name
Setting Range
Meaning
Setting Example
7
Rated Motor Speed Setting
1 to 32000
Rated Servomotor speed
400 r/mm
17
Motion Controller Function
Selection Flags
0, 1, 2, 3
Bits 0 to 3: Reference unit selection
0 (Pulse)
33
Number of Pulses Per Motor
Rotation
1 to 2
31
-1
Number of reference pulses needed
to turn the Servomotor one rotation.
200 pulses
38
Maximum Pulse Output Frequency
1 to 50
1 = 10 kHz
10 (100 kHz)