Yaskawa MP920 Motion Module User Manual
Page 336
7 PO-01 Module Specification and Handling
7.3.1 Motion Fixed Parameters
7-34
17
Bit 9
Override Selection
(USE-OV)
Set whether or not to use the override function.
(For interpolation related commands, set override in the
register specified in the Group Definition Window.)
0: Disabled
1: Enabled
The OW2C: Override is used when this parameter is
set to Enabled. The override is fixed at 100 if this parame-
ter is disabled.
Note: The override function always the feed speed set-
ting to be modified in an application.
0
(Disabled)
Bit 10
Deceleration Limit
Switch Inversion
Selection
(INV_DEC)
Set whether or not to invert and use the limit switch signal
(deceleration limit switch) when returning to the zero
point.
0: Not inverted
1: Invert
0
(Not inverted)
Bits 11 to 15
Not used.
−
−
18
Number of Digits
Below Decimal Point
(DECNUM)
Set the number of digits to the right of the decimal point in input reference units.
The minimum reference unit is determined by this parameter and Reference Unit
Selection in the Motion Controller Function Selection Flags (bit 0 to bit 3).
3
19
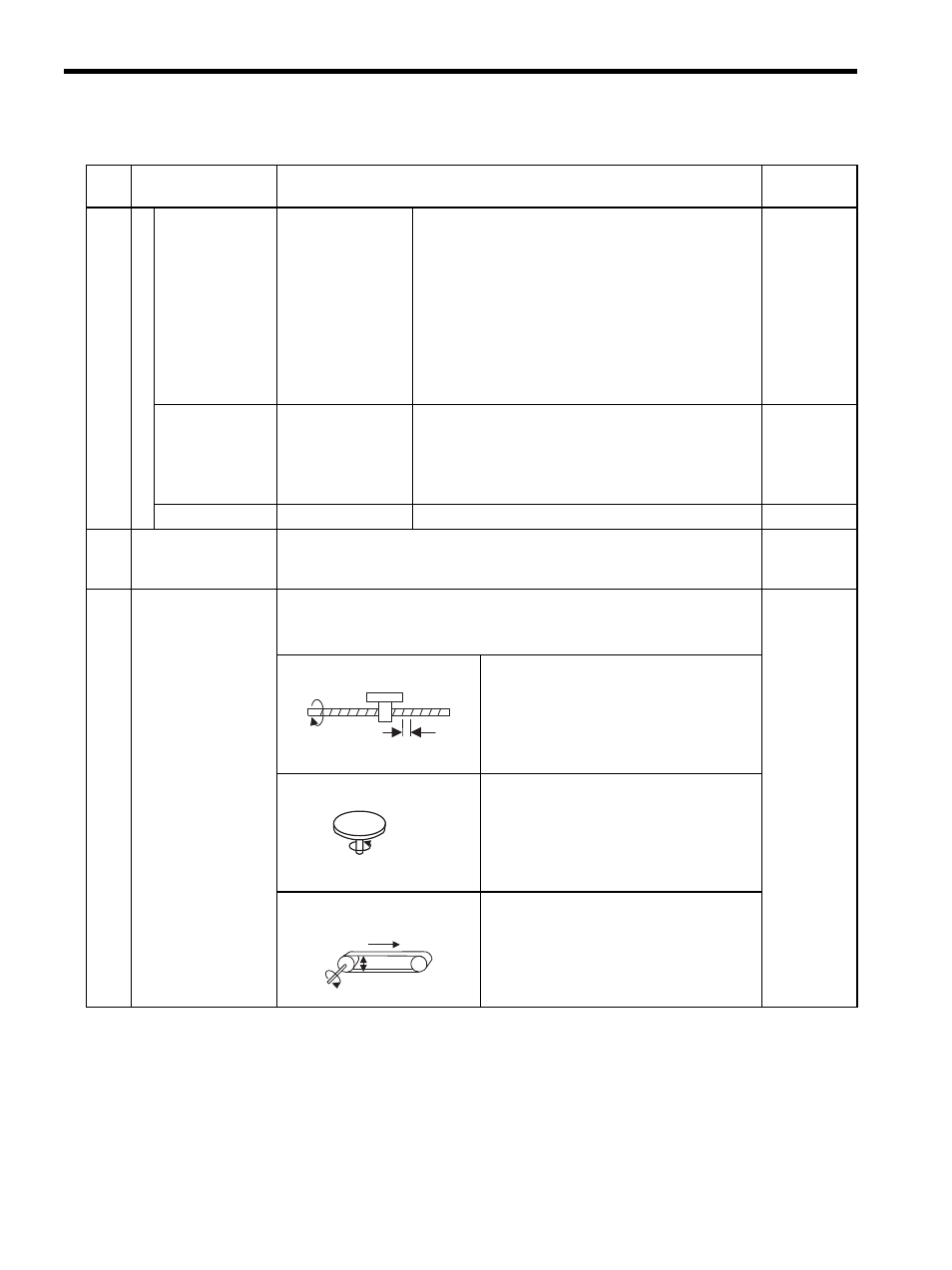
Travel Distance Per
Machine Rotation
(PITCH)
This parameter determines the load travel amount (reference units) per load axis
rotation.
• Setting range: 1 to 2
31
-1
10000
Ball screw
Ball screw pitch = 10 mm
Reference Unit Selection = mm
Number of digits below decimal point = 3
↓
Set the travel distance per machine rotation to
10000.
Rotating table
One table rotation = 360
°
Reference Unit Selection = deg
Number of digits below decimal point = 3
↓
Set the travel distance per machine rotation to
360000
Belt
One roller rotation = 360
°
Reference Unit Selection = mm
Number of digits below decimal point = 3
↓
Set the travel distance per machine rotation to
πD × 1000.
Table 7.9 Motion Fixed Parameters (cont’d)
No. Name
Description
Factory
Setting
Ball screw pitch = 10 mm
10
One rotation = 360
°
D
D
π