2 motion control methods, Ladder logic programming, Motion programming – Yaskawa MP920 Motion Module User Manual
Page 30
2 Motion Control
2.1.2 Motion Control Methods
2-4
2.1.2
Motion Control Methods
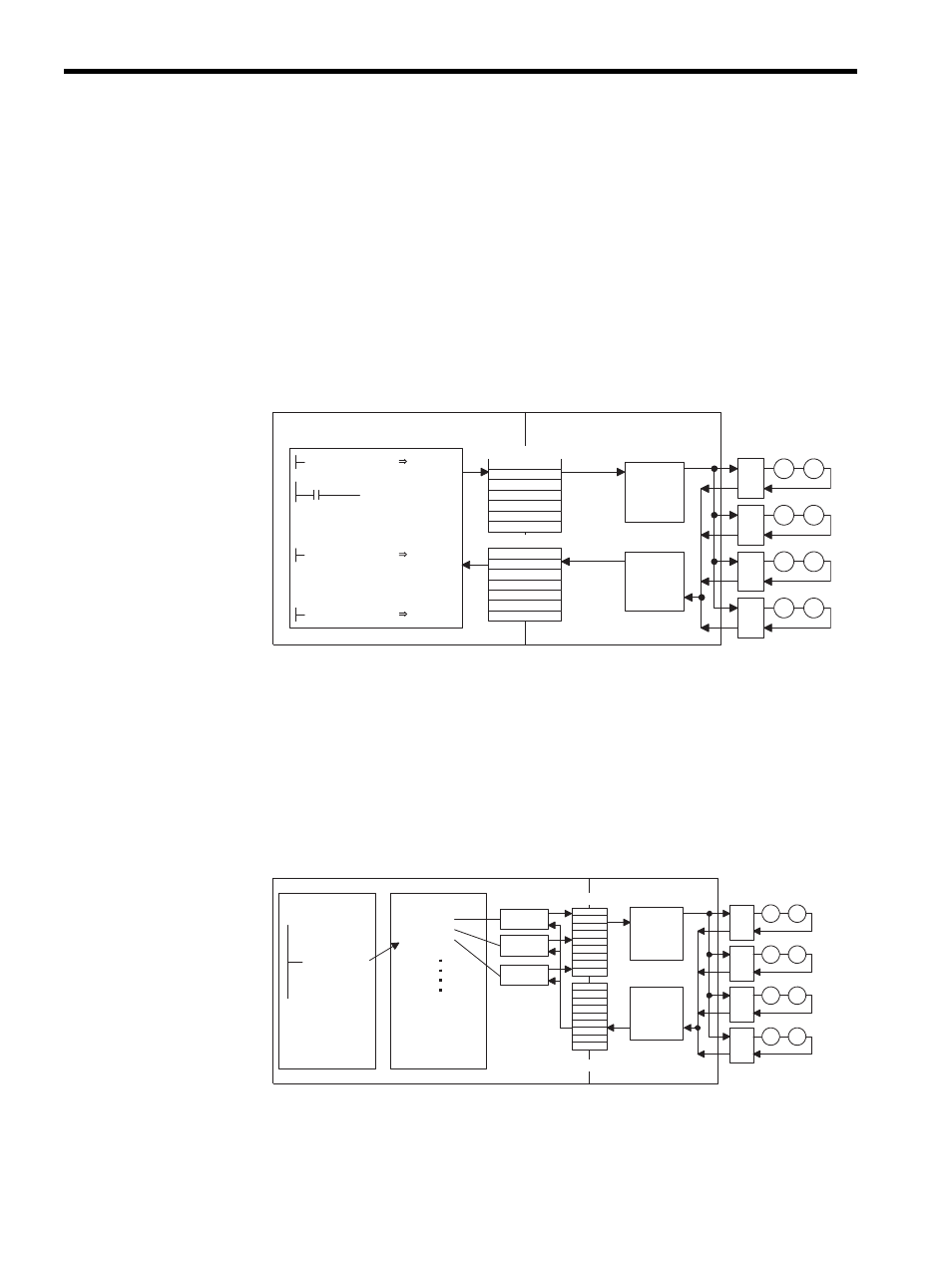
By using Motion Modules, motions for a wide variety of applications can be controlled.
There are two programming methods for controlling motions: Ladder logic programs and
motion programs. An overview of each programming method is given below.
Ladder Logic Programming
Ladder logic programs are designed mainly for sequence control. The motion setting param-
eters and motion monitoring parameters used as interfaces with the Motion Modules are
directly written to and read by the ladder logic programs to perform motion control.
Special operations can be programmed and combined as user functions. For details, refer to
Chapter4 Parameters and the section describing the parameters of each Motion Module.
Motion Programming
The motion programs that have been created using a special motion language perform
motion control. Up to 256 programs can be created, and these can also be executed in paral-
lel.
The use of the special motion language enables complex operations to be easily pro-
grammed. The system performs command end checks and other processing. The special
motion commands shown in the following table are provided as standard in the MP9
Series.
H0101
OWC000
B00105
IFON
500
OWC015
0
OWC015
ELSE
Ladder logic program
Motion
processing
Setting Parameters
Monitoring Parameters
CPU Module
SVA Module
SERVO-
PACK
PG
M
PG
M
PG
M
PG
M
Status
Status
information
SERVO-
PACK
SERVO-
PACK
SERVO-
PACK
CPU Module
SVA Module
CPU Module
MSEE MPM001
Motion program
MOV [X] 100
MVS [X] 100
MCC - - - -
EXT
Command
processing
PG
M
PG
M
PG
M
PG
M
Setting Parameters
Monitoring Parameters
MOV
command
MOV
command
MOV
command
Status
information
SERVO-
PACK
SERVO-
PACK
SERVO-
PACK
SERVO-
PACK